マニピュレーターのモデル化
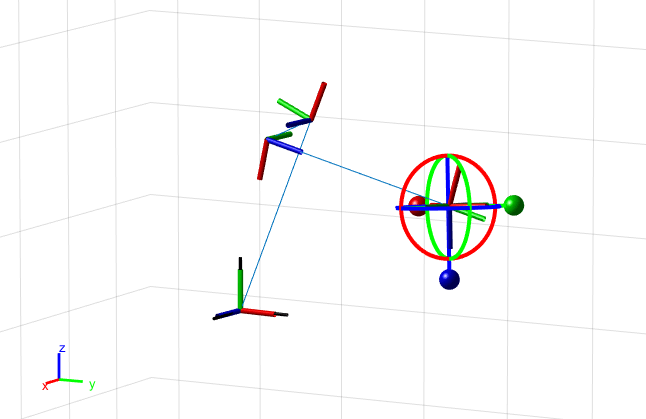
ロボット モデルは、マニピュレーター ロボットおよびその他の剛体システムの運動学プロパティと動的プロパティをシミュレートします。このモデルは、rigidBody および rigidBodyJoint の要素を含み、ジョイント変換と慣性プロパティをもつ rigidBodyTree オブジェクトです。
関数 loadrobot を使用して、Kinova® や KUKA™ などの特定の商用ロボットの事前定義モデルにアクセスします。
既存の UDRF または Simscape™ Multibody™ モデルをインポートするには importrobot を使用します。
exportrobot を使用して剛体ツリー モデルから URDF の詳細をファイル形式でエクスポートするか、urdfExporter を使用して URDF エクスポーター オブジェクトを作成します。
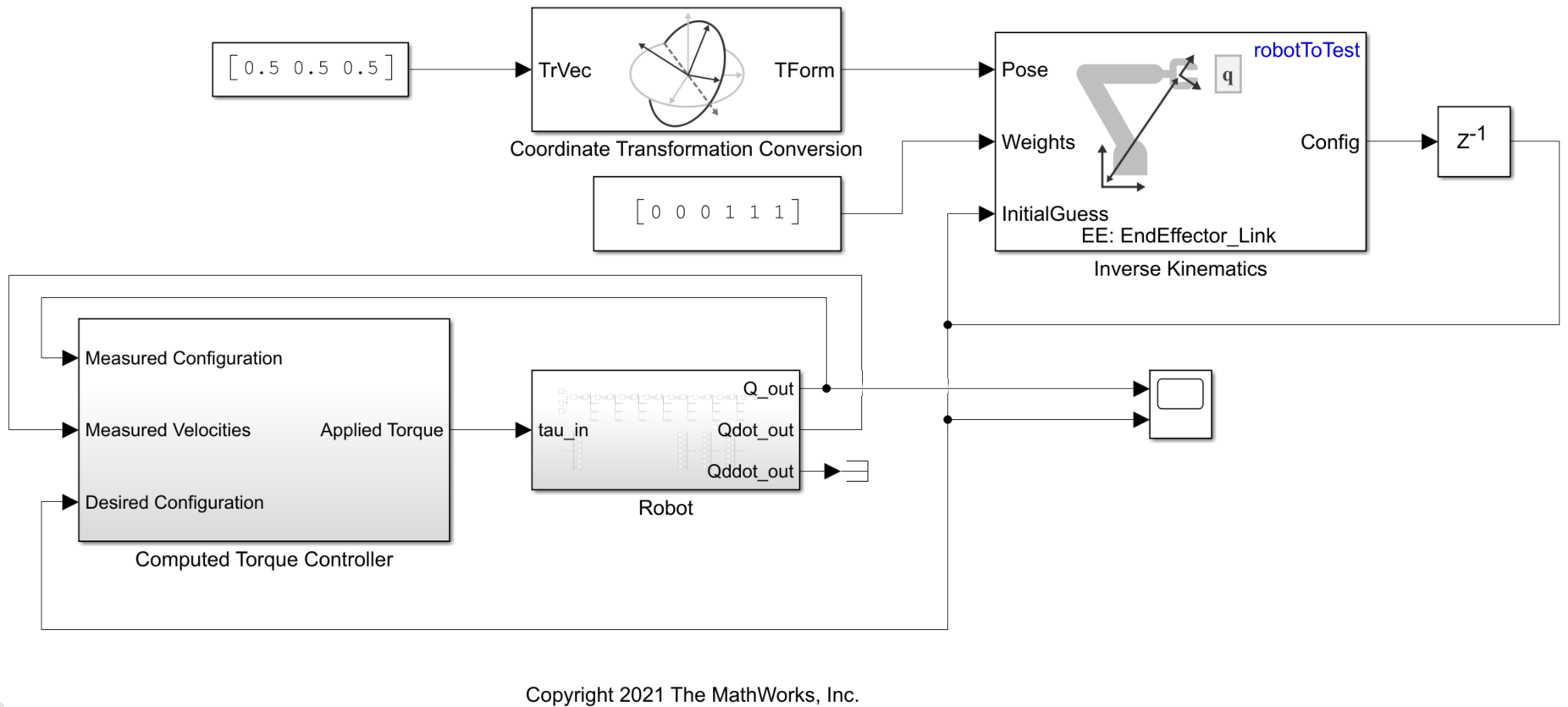
ジョイント空間またはタスク空間の運動モデルを使用して、ロボットの動作を jointSpaceMotionModel および taskSpaceMotionModel オブジェクトとしてモデル化します。
関数
ブロック
トピック
- 剛体ツリー ロボット モデル
剛体ツリー ロボット モデルの構造と固有コンポーネントを確認する。
- ロボットの段階的な構築
この例では、ロボットの構築プロセスを段階的に説明し、さまざまなロボット コンポーネントと、ロボット構築で関数を呼び出す方法を示します。
- Joint-Space Motion Model
The joint-space motion model characterizes the motion of a manipulator under closed-loop joint-space position control, as used in the
jointSpaceMotionModelobject and Joint Space Motion Model block. - Task-Space Motion Model
The task-space motion model characterizes the motion of a manipulator under closed-loop task-space position control, as used in the
taskSpaceMotionModelobject and Task Space Motion Model block. - ロボット ダイナミクス
このトピックでは、剛体ロボット ダイナミクスのさまざまな要素、プロパティ、方程式について詳しく説明します。
- Robotics System Toolbox Robot Library Data サポート パッケージのインストール
アドオンを使用してロボット メッシュ データを追加します。
注目の例



You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)