位置推定と姿勢推定
慣性ナビゲーション、姿勢推定、スキャン マッチング、モンテカルロ位置推定
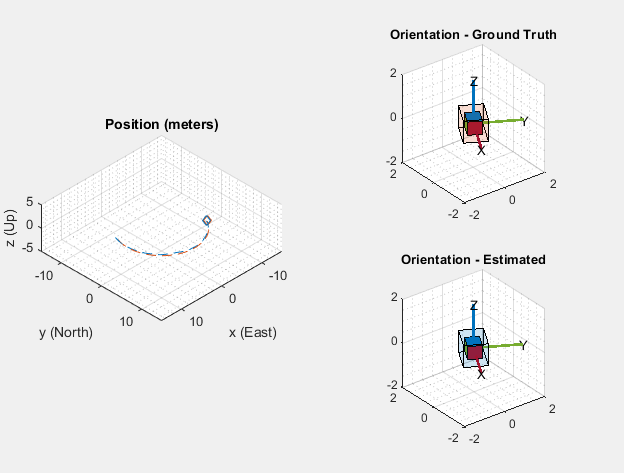
位置推定と姿勢推定のアルゴリズムを使用して、環境内でのビークルの向きを決定します。慣性センサー フュージョンは、フィルターを使用して IMU、GPS などのセンサー読み取り値を改善し、組み合わせます。モンテカルロ位置推定、スキャン マッチングなどの位置推定アルゴリズムは、距離センサーまたは LIDAR の読み取り値を使用して、既知のマップでの姿勢を推定します。姿勢グラフは推定姿勢を追跡し、エッジの制約およびループ閉じ込みに基づいて最適化することができます。
特定のセンサーをモデル化する場合は、センサー モデルを参照してください。
自己位置推定と環境地図作成の同時実行については、SLAMを参照してください。
カテゴリ
- 慣性センサー フュージョン
IMU と GPS による慣性ナビゲーション、センサー フュージョン、カスタム フィルター調整
- 位置推定アルゴリズム
粒子フィルター、スキャン マッチング、モンテカルロ位置推定、姿勢グラフ、オドメトリ
注目の例






You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)