このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
cpselect
コントロール ポイント選択ツール
構文
説明
cpselect( は、コントロール ポイント選択ツールを起動します。このツールにより、2 つの関連するイメージの中のコントロール ポイントが選択できます。moving,fixed)moving は、fixed イメージの座標系に合わせてゆがめられるイメージです。
コントロール ポイント選択ツールが開いたら、マウスを使用して対話的にコントロール ポイントを追加、移動、および削除できます。コントロール ポイントの変更が完了したら、[ファイル] メニューから [ワークスペースにポイントをエクスポート] を選択して、コントロール ポイントをワークスペースにエクスポートします。このツールは、選択された有効な移動および固定のコントロール ポイントの組の座標を 2 つの数値ベクトルで返すことができます。また、このツールは、すべての選択されたコントロール ポイントとインデックス情報を cpstruct 構造体で返すことができます。この構造体にはツールの状態が保存されるため、ツールを後で再開できます。ツールの使用方法の詳細については、コントロール ポイントの選択手順を参照してください。
cpselect( は、有効な移動および固定のコントロール ポイントの組の初期セット moving,fixed,initialMovingPoints,initialFixedPoints)initialMovingPoints と initialFixedPoints を使用して、コントロール ポイント選択ツールを開始します。
cpselect( は、moving,fixed,cpstruct_in)cpstruct_in に格納されたコントロール ポイントの初期セットとインデックス情報を使用して、コントロール ポイント選択ツールを開始します。この構文を使用して、以前に保存した状態からコントロール ポイント選択ツールを再開します。
h = cpselect(___)h を返します。close(h) コマンドを使用すると、コマンド ラインからツールを閉じることができます。
h = cpselect(___,'Wait',false)h を返します。close(h) 構文を使用すると、コマンド ラインからツールを閉じることができます。'Wait' を true として設定するのとは異なり、この構文では、MATLAB® の他のプログラムと同時に cpselect を実行できます。
[ は、コントロール ポイントの選択を終了するまで、MATLAB コマンド ラインを制御します。コントロール ポイントの選択を終了したら、ツールを終了してワークスペースに戻ります。selectedMovingPoints,selectedFixedPoints] = cpselect(___,'Wait',true)cpselect は、選択された有効な移動および固定のコントロール ポイントの組の座標を selectedMovingPoints と selectedFixedPoints で返します。
例
保存されたイメージを使用したコントロール ポイント選択ツールの起動
イメージ westconcordorthophoto.png をワークスペースに読み取ります。このイメージは、地上にレジストレーションされた正射写真です。
fixed = imread('westconcordorthophoto.png');イメージ westconcordaerial.png をワークスペースに読み取ります。このイメージは飛行機から撮影されたもので、正射写真と比較して変形されています。
moving = imread('westconcordaerial.png');レジストレーションするイメージと参照イメージの名前を指定して、cpselect を呼び出します。ここでマウスを使用して対話的にコントロール ポイントを追加、移動、および削除できます。コントロール ポイントの追加が完了したら、[ファイル] メニューから [ワークスペースにポイントをエクスポート] を選択して、コントロール ポイントをワークスペースにエクスポートします。
cpselect('westconcordaerial.png','westconcordorthophoto.png');

事前定義されたコントロール ポイントを使用してコントロール ポイント選択ツールを開く
サンプルの参照イメージを作成します。このイメージは固定イメージです。
I = checkerboard;
サンプル イメージを回転して引き伸ばしたコピーを作成します。このイメージは移動イメージであり、固定イメージと位置合わせをします。
J = imresize(I,'Scale',[1 1.3]);
moving = imrotate(J,30);移動イメージと固定イメージについて、対応する 3 つのコントロール ポイントの (x,y) 座標を指定します。
fixedPoints = [10.7 30.6; 40.5 50.6; 20.6 10.7]; movingPoints = [21.6 64.2; 71.1 70.3; 28.7 48.3];
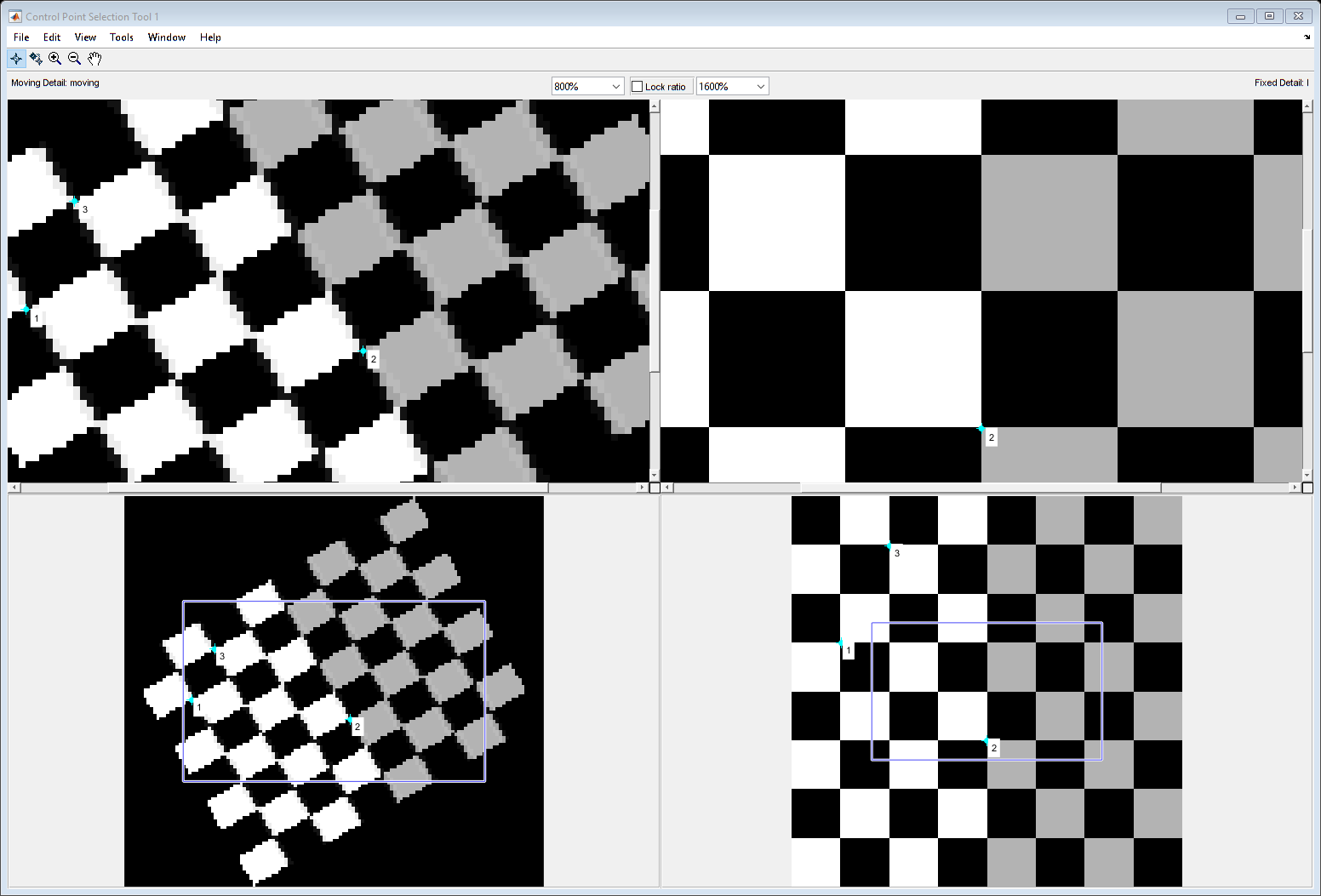
サンプルの固定イメージと移動イメージおよび保存した 2 組のコントロール ポイントを指定し、コントロール ポイント選択ツールを開きます。ここで続けて、マウスを使用して対話的にコントロール ポイントを追加、移動、および削除できます。コントロール ポイントの変更が完了したら、[ファイル] メニューから [ワークスペースにポイントをエクスポート] を選択して、コントロール ポイントをワークスペースにエクスポートします。
h = cpselect(moving,I,movingPoints,fixedPoints);
関数 close を使用して、プログラムでコントロール ポイント選択ツールを閉じます。
close(h)
入力引数
出力引数
ヒント
スクリプトで
cpselectを呼び出す際には'Wait'オプションをtrueに指定します。'Wait'オプションを使用すると、コントロール ポイントが選択されて返されるまで、cpselectによって MATLAB コマンド ラインがブロックされます。'Wait'オプションが使用されない場合は、cpselectは直ちに制御を返し、スクリプトはコントロール ポイントを選択する時間を待たずに続行します。また、'Wait'オプションが使用されなければ、cpselectは戻り値としてコントロール ポイントを返しません。
アルゴリズム
cpselect では、コントロール ポイントの予測に次の一般的な処理が使用されます。
コントロール ポイントの有効な組をすべて検出します。
有効なコントロール ポイントの組の数に基づいて、
movingコントロール ポイントとfixedコントロール ポイントの間の空間変換を推測します。変換タイプ
コントロール ポイントのペアの最小数 非鏡映相似
2
アフィン
3
射影
4
空間変換を新しい点に適用します。この変換によって予測点が生成されます。
予測点を表示します。
バージョン履歴
R2006a より前に導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)