このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
stepplot
追加のプロット カスタマイズ オプションを使用してステップ応答をプロットする
構文
説明
stepplot では、step よりも広範囲のプロット カスタマイズ オプションを使用して動的システムのステップ応答をプロットできます。stepplot を使用してプロット ハンドルを取得し、それを使用して軸座標のラベル、軸座標の範囲、軸座標の単位の変更など、プロットをカスタマイズできます。stepplot を使用して、座標軸ハンドルで表される既存の座標軸のセット上にステップ応答プロットを描画することもできます。プロット ハンドルを使用して既存のステップ プロットをカスタマイズするには、次のようにします。
プロット ハンドルを取得
getoptionsを使用してオプション セットを取得setoptionsを使用してプロットを更新し、必要なオプションを変更
詳細については、コマンド ラインからの応答プロットのカスタマイズ (Control System Toolbox)を参照してください。既定のオプションを使用してステップ プロットを作成するか、ステップ応答データを抽出するには、step を使用します。
h = stepplot(sys)sys のステップ応答をプロットし、プロットのプロット ハンドル h を返します。getoptions コマンドと setoptions コマンドを使ってプロットをカスタマイズするために、このハンドル h を使用できます。
h = stepplot(___,plotoptions)plotoptions で指定されたオプション セットを使用してステップ応答をプロットします。これらのオプションを使用して、コマンド ラインからステップ プロットの外観をカスタマイズできます。plotoptions に指定する設定は、stepplot を実行する MATLAB® セッションの基本設定をオーバーライドします。したがって、ローカルの基本設定にかかわらず、同じ外観の複数のプロットを生成するスクリプトを記述する場合、この構文が有用です。
h = stepplot(___,dataoptions)dataoptions で指定されたオプション セットを使用してステップ応答をプロットします。この構文を使用すると、ステップ振幅や入力オフセットなどのオプションをオプション セット dataoptions を使用して指定できます。この構文は、同じオプション セットを使用して複数のプロットを生成するスクリプトを記述する場合に便利です。オプション セットは stepDataOptions を使用して作成します。
例
プロット ハンドルを使用したステップ プロットのカスタマイズ
この例では、プロット ハンドルを使用して時間単位を分に変更し、グリッドをオンにします。
5 つの状態をもつランダムな状態空間モデルを生成し、プロット ハンドル h をもつステップ応答プロットを作成します。
rng("default")
sys = rss(5);
h = stepplot(sys);時間単位を分に変更し、グリッドをオンにします。そのためには、setoptions を使用してプロット ハンドル h のプロパティを編集します。
setoptions(h,'TimeUnits','minutes','Grid','on');

setoptions を呼び出すと、ステップ プロットは自動的に更新されます。
または、timeoptions コマンドを使用して、必要なプロット オプションを指定することもできます。最初に、ツールボックス基本設定に基づいてオプション セットを作成します。
plotoptions = timeoptions('cstprefs');時間単位を分に設定してグリッドを有効にすることで、オプション セットのプロパティを変更します。
plotoptions.TimeUnits = 'minutes'; plotoptions.Grid = 'on'; stepplot(sys,plotoptions);

同じオプション セットを使用して、同じカスタマイズを使用する複数のステップ プロットを作成できます。独自のツールボックス基本設定によっては、得られるプロットはこのプロットの外観と異なる場合があります。明示的に設定したプロパティ (この例では、TimeUnits および Grid) のみが、ツールボックス基本設定をオーバーライドします。
ステップ プロットでの正規化された応答の表示
2 つの動的システムのステップ応答プロットを生成します。
sys1 = rss(3); sys2 = rss(3); h = stepplot(sys1,sys2);
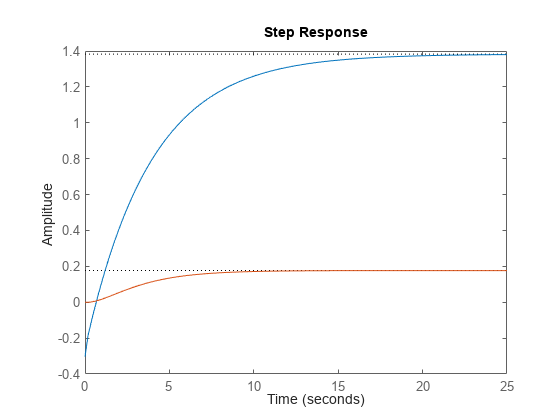
それぞれのステップ応答が異なる定常値で安定します。プロット ハンドルを使用して、プロットされた応答を正規化します。
setoptions(h,'Normalize','on')

今度は、任意単位で表された同じ値で応答が安定します。
信頼領域を含む同定されたモデルのステップ応答のプロット
パラメトリックと同定されたモデルのステップ応答をノンパラメトリック (実測) モデルのステップ応答と比較し、3-σ の信頼領域を表示します。(同定されたモデルには、System Identification Toolbox™ ソフトウェアが必要です。)
サンプル データからパラメトリックおよびノンパラメトリック モデルを同定します。
load iddata1 z1 sys1 = ssest(z1,4); sys2 = impulseest(z1);
両方の同定されたモデルのステップ応答をプロットします。プロット ハンドルを使用して、3-σ の信頼領域を表示します。
t = -1:0.1:5; h = stepplot(sys1,'r',sys2,'b',t); showConfidence(h,3) legend('parametric','nonparametric')
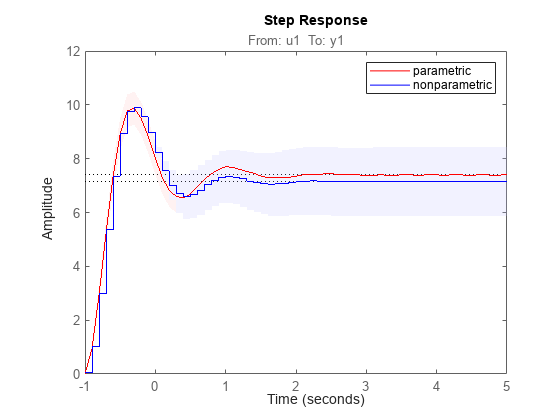
ノンパラメトリック モデル sys2 で不確かさが高まっているのがわかります。
指定された時間でのカスタマイズされたステップ応答プロット
この例では、次の零点-極-ゲイン モデルのステップ応答を調べて、ステップ プロットを tFinal = 15 秒に制限します。タイトルに 15 ポイントの青いテキストを使用します。このプロットは、それを生成する MATLAB セッションの基本設定にかかわらず、外観が同じになります。
sys = zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05]); tFinal = 15;
最初に、timeoptions を使用して既定のオプション セットを作成します。
plotoptions = timeoptions;
次に、オプション セット plotoptions の必要なプロパティを変更します。
plotoptions.Title.FontSize = 15; plotoptions.Title.Color = [0 0 1];
これで、オプション セット plotoptions を使用してステップ応答プロットを作成します。
h = stepplot(sys,tFinal,plotoptions);

plotoptions は固定のオプション セットで開始されるため、プロットの結果は MATLAB セッションのツールボックス基本設定とは独立したものになります。
非線形の同定されたモデルのステップ応答のプロット
非線形 Hammerstein-Wiener モデルを推定するためのデータを読み込みます。
load twotankdata z = iddata(y,u,0.2,'Name','Two tank system');
z は、入出力の推定データを格納する iddata オブジェクトです。
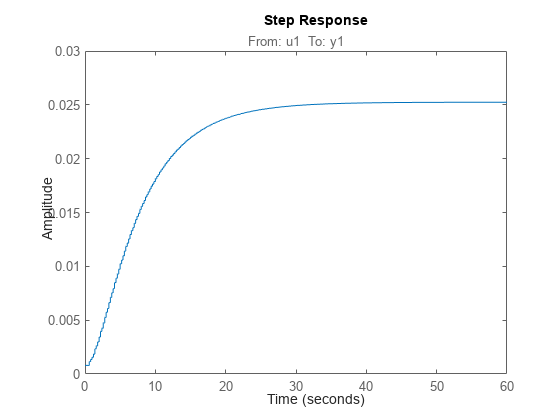
推定データを使用して次数 [1 5 3] の Hammerstein-Wiener モデルを推定します。入力の非線形性を区分的線形と指定し、出力の非線形性を 1 次元多項式と指定します。
sys = nlhw(z,[1 5 3],idPiecewiseLinear,idPolynomial1D);
オプション セットを作成して、入力オフセットおよびステップ振幅レベルを指定します。
opt = RespConfig(InputOffset=2,Amplitude=0.5);
指定したオプションを使用して 60 秒までのステップ応答をプロットします。
stepplot(sys,60,opt);
入力引数
出力引数
バージョン履歴
R2012a で導入
参考
getoptions | setoptions | showConfidence | step | stepDataOptions | timeoptions
トピック
- コマンド ラインからの応答プロットのカスタマイズ (Control System Toolbox)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)