このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
stepinfo
立ち上がり時間、整定時間、および他のステップ応答の特性
構文
説明
stepinfo では、動的システム モデルまたはステップ応答データの配列についてのステップ応答の特性を計算できます。ステップ応答 y(t) について、stepinfo は yinit および yfinal に対する特性を計算します。ここで、yinit は初期オフセット、つまり、ステップが適用される前の値です。yfinal は応答の定常値です。これらの値は使用する構文によって異なります。
動的システム モデル
sysの場合、stepinfoは yinit = 0 および yfinal = 定常値を使用します。ステップ応答データの配列
[y,t]の場合、stepinfoは yinit = 0 および yfinal =yの最後のサンプル値を使用します (これらの値を明示的に指定しない場合)。
stepinfo によるステップ応答特性の計算方法の詳細については、アルゴリズムを参照してください。
次の図は、stepinfo で計算されるステップ応答の特性の一部を示したものです。この応答では、t < 0 において y(t) = 0 と仮定しているため、yinit = 0 です。

S = stepinfo(y,t,yfinal)yfinal に対するステップ応答の特性を計算します。この構文は、測定ノイズなどの理由から、予想される定常状態システム応答が y の最後の値とは異なることがわかっている場合に有用です。この構文では yinit = 0 を使用します。
SISO の応答の場合、t と y は、同じ長さ NS をもつベクトルです。NU 入力と NY 出力をもつシステムについては、y を NS×NY×NU の配列 (step を参照)、yfinal を NY 行 NU 列の配列として指定できます。この場合、stepinfo は、NY 行 NU 列の各 I/O ペアに対応する応答特性の構造体配列 S を返します。
例
動的システムのステップ応答の特性
動的システム モデルの立ち上がり時間、整定時間、オーバーシュートなどのステップ応答の特性を計算します。この例では、連続時間の伝達関数を使用します。
伝達関数を作成してそのステップ応答を確認します。
sys = tf([1 5 5],[1 1.65 5 6.5 2]); step(sys)

プロットから、応答は数秒間で立ち上がった後、約 2.5 の定常値に下がることがわかります。stepinfo を使用してこの応答の特性を計算します。
S = stepinfo(sys)
S = struct with fields:
RiseTime: 3.8456
TransientTime: 27.9762
SettlingTime: 27.9762
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
ここで、関数は = 0 を使用して動的システム モデル sys の特性を計算します。
既定では、整定時間は、誤差が の 2% を下回ったままでいるまでの所要時間になります。結果の S.SettlingTime から、sys ではこの条件が約 28 秒後に発生することがわかります。既定では、立ち上がり時間は、応答が = 0 から までの間で 10% から 90% に上がるまでの時間として定義されます。S.RiseTime から、sys ではこの立ち上がりが 4 秒未満で発生することがわかります。最大オーバーシュートは S.Overshoot に返されます。このシステムでは、ピーク値 S.Peak が時間 S.PeakTime で発生し、定常値を約 7.5% オーバーシュートします。
MIMO システムのステップ応答の特性
MIMO システムの場合、stepinfo は構造体配列を返し、その各エントリはシステムの対応する I/O チャネルの応答特性を含みます。この例では、2 つの出力と 2 つの入力をもつ離散時間システムを使用します。ステップ応答の特性を計算します。
A = [0.68 -0.34; 0.34 0.68]; B = [0.18 -0.05; 0.04 0.11]; C = [0 -1.53; -1.12 -1.10]; D = [0 0; 0.06 -0.37]; sys = ss(A,B,C,D,0.2); S = stepinfo(sys)
S=2×2 struct array with fields:
RiseTime
TransientTime
SettlingTime
SettlingMin
SettlingMax
Overshoot
Undershoot
Peak
PeakTime
特定の I/O チャネルの応答の特性にアクセスするには、S にインデックスを付けます。たとえば、S(2,1) に対応する、sys の最初の入力から 2 番目の出力への応答の特性を調べます。
S(2,1)
ans = struct with fields:
RiseTime: 0.4000
TransientTime: 2.8000
SettlingTime: 3
SettlingMin: -0.6724
SettlingMax: -0.5188
Overshoot: 24.6476
Undershoot: 11.1224
Peak: 0.6724
PeakTime: 1
特定の値にアクセスするには、ドット表記を使用します。たとえば、(2,1) チャネルの立ち上がり時間を抽出します。
rt21 = S(2,1).RiseTime
rt21 = 0.4000
整定時間または立ち上がり時間の割合の指定
整定時間および立ち上がり時間の既定の割合は、アルゴリズムの節で説明しているように、SettlingTimeThreshold および RiseTimeThreshold を使用してそれぞれ変更できます。この例では、次で与えられるシステムを使用します。
伝達関数を作成します。
sys = tf([1 5 5],[1 1.65 5 6.5 2]);
sys の応答の誤差がギャップ の 0.5% を下回ったままでいるまでの時間を計算します。そのためには SettlingTimeThreshold を 0.5%、つまり 0.005 に設定します。
S1 = stepinfo(sys,'SettlingTimeThreshold',0.005);
st1 = S1.SettlingTimest1 = 46.1325
sys の応答が から までの間で 5% から 95% に上がるまでの時間を計算します。そのためには、RiseTimeThreshold をこれらの範囲を含むベクトルに設定します。
S2 = stepinfo(sys,'RiseTimeThreshold',[0.05 0.95]);
rt2 = S2.RiseTimert2 = 4.1690
整定時間と立ち上がり時間の両方の割合を同じ計算で定義できます。
S3 = stepinfo(sys,'SettlingTimeThreshold',0.005,'RiseTimeThreshold',[0.05 0.95])
S3 = struct with fields:
RiseTime: 4.1690
TransientTime: 46.1325
SettlingTime: 46.1325
SettlingMin: 2.0689
SettlingMax: 2.6873
Overshoot: 7.4915
Undershoot: 0
Peak: 2.6873
PeakTime: 8.0530
応答データからのステップ応答の特性
システムのモデルがない場合でも、ステップ応答データからステップ応答の特性を抽出することができます。たとえば、システムのステップ入力への応答を測定して、結果の応答データを、応答値を含むベクトル y と応答の時間を含むもう 1 つのベクトル t に保存したとします。応答データを読み込んで調べます。
load StepInfoData t y plot(t,y)

stepinfo を使用して、この応答データからステップ応答の特性を計算します。定常状態応答値 yfinal を指定しない場合、stepinfo では、応答ベクトル y の最後の値が定常状態応答であると仮定します。データにはノイズが含まれるため、y の最後の値は実際の定常状態応答値ではない可能性があります。定常値がわかっている場合は、それを stepinfo に対し指定できます。この例では、定常状態応答を 2.4 と仮定します。
S1 = stepinfo(y,t,2.4)
S1 = struct with fields:
RiseTime: 1.2897
TransientTime: 19.6478
SettlingTime: 19.6439
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
データにノイズがあるため整定時間の既定の定義では厳密すぎ、その結果、ほぼ 20 秒の不特定の値になります。ノイズを考慮するため、整定時間のしきい値を既定の 2% から 5% に増やします。
S2 = stepinfo(y,t,2.4,'SettlingTimeThreshold',0.05)S2 = struct with fields:
RiseTime: 1.2897
TransientTime: 10.4201
SettlingTime: 10.4149
SettlingMin: 2.0219
SettlingMax: 3.3302
Overshoot: 38.7575
Undershoot: 0
Peak: 3.3302
PeakTime: 3.4000
ステップ応答の過渡時間と整定時間の相違
ピーク偏差 がギャップ (アルゴリズム (Control System Toolbox)を参照) と等しければ、整定時間と過渡時間は等しくなります。これには、アンダーシュートやフィードスルーがなく、オーバーシュートが 100% 未満のモデルが該当します。フィードスルーをもつモデル、原点に零点があるモデル、不安定な零点 (アンダーシュート) をもつモデル、オーバーシュートが大きいモデルでは、これらが等しくならない傾向があります。
次のモデルについて考えます。
s = tf('s'); sys1 = 1+tf(1,[1 1]); % feedthrough sys2 = tf([1 0],[1 1]); % zero at the origin sys3 = tf([-3 1],[1 2 1]); % non-minimum phase with undershoot sys4 = (s/0.5 + 1)/(s^2 + 0.2*s + 1); % large overshoot step(sys1,sys2,sys3,sys4) grid on legend('Feedthrough','Zero at origin','Non-minimum phase with undershoot','Large overshoot')

ステップ応答の特性を計算します。
S1 = stepinfo(sys1)
S1 = struct with fields:
RiseTime: 1.6095
TransientTime: 3.9121
SettlingTime: 3.2190
SettlingMin: 1.8005
SettlingMax: 1.9993
Overshoot: 0
Undershoot: 0
Peak: 1.9993
PeakTime: 7.3222
S2 = stepinfo(sys2)
S2 = struct with fields:
RiseTime: 0
TransientTime: 3.9121
SettlingTime: NaN
SettlingMin: 6.6069e-04
SettlingMax: 1
Overshoot: Inf
Undershoot: 0
Peak: 1
PeakTime: 0
S3 = stepinfo(sys3)
S3 = struct with fields:
RiseTime: 2.9198
TransientTime: 6.5839
SettlingTime: 7.3229
SettlingMin: 0.9004
SettlingMax: 0.9991
Overshoot: 0
Undershoot: 88.9466
Peak: 0.9991
PeakTime: 10.7900
S4 = stepinfo(sys4)
S4 = struct with fields:
RiseTime: 0.3896
TransientTime: 40.3317
SettlingTime: 46.5052
SettlingMin: -0.2796
SettlingMax: 2.7571
Overshoot: 175.7137
Undershoot: 27.9629
Peak: 2.7571
PeakTime: 1.8850
プロットと特性を調べます。これらのモデルでは、ピーク偏差が初期値と最終値のギャップよりも大きいため、整定時間と過渡時間が等しくなりません。sys2 のようなモデルの場合、定常値がゼロであるため、整定時間は NaN として返されます。
初期オフセットをもつデータのステップ応答の特性
この例では、初期オフセットをもつステップ応答データからステップ応答の特性を計算します。これは、ステップ発生前の応答データの値が非ゼロであることを意味します。
ステップ応答データを読み込んでプロットを調べます。
load stepDataOffset.mat
plot(stepOffset.Time,stepOffset.Data)
yfinal および yinit を指定しない場合、stepinfo では、yfinal は応答ベクトル y の最後の値、yinit はゼロであると仮定します。定常値と初期値がわかっている場合は、それらを stepinfo に対して指定できます。ここでは、応答の定常状態 yfinal は 0.9 で、初期オフセット yinit は 0.2 です。
この応答データからステップ応答の特性を計算します。
S = stepinfo(stepOffset.Data,stepOffset.Time,0.9,0.2)
S = struct with fields:
RiseTime: 0.0084
TransientTime: 1.0662
SettlingTime: 1.0662
SettlingMin: 0.8461
SettlingMax: 1.0878
Overshoot: 26.8259
Undershoot: 0.0429
Peak: 0.8878
PeakTime: 1.0225
ここで、stepinfo は yinit からの最大偏差を測定するため、この応答のピーク値は 0.8878 になります。
入力引数
sys — 動的システム
動的システム モデル
動的システム。SISO または MIMO 動的システム モデルとして指定します。使用できる動的システムには次のようなものがあります。
tf(Control System Toolbox)、zpk(Control System Toolbox)、ss(Control System Toolbox) モデルなどの連続時間または離散時間の数値 LTI モデル。genss(Control System Toolbox) やuss(Robust Control Toolbox) モデルなどの一般化された、あるいは不確かさをもつ LTI モデル。(不確かさをもつモデルを使用するには Robust Control Toolbox™ ソフトウェアが必要です。)一般化モデルの場合、stepinfoは、調整可能なブロックの現在の値と不確かさをもつブロックのノミナル値を使用してステップ応答の特性を計算します。
y — ステップ応答データ
ベクトル | 配列
ステップ応答データ。次のいずれかとして指定します。
SISO 応答データの場合、長さ
Nsのベクトル。Nsは応答データ内のサンプル数です。MIMO 応答データの場合、
Ns×Ny×Nuの配列。Nyはシステム出力の数、Nuはシステム入力の数です。
t — 時間ベクトル
ベクトル
y の応答データに対応する時間ベクトル。長さ Ns のベクトルとして指定します。
yfinal — 定常値
スカラー | 配列
yinit — 初期値
スカラー | 配列
ステップ発生前の y の値。スカラーまたは配列として指定します。
SISO 応答データの場合、スカラー値を指定します。
MIMO 応答データの場合、
Ny行Nu列の配列を指定します。各エントリは対応するシステム チャネルの応答初期値を指定します。
yinit を指定しない場合、stepinfo は、応答初期値としてゼロを使用します。
フィードスルーがないシステムでは、t = 0 の応答 y(0) は yinit と等しくなります。ただし、フィードスルーがある場合は、t = 0 の不連続性により、2 つの量は等しくなりません。
たとえば、次の図は、フィードスルーをもつシステム sys = tf([-1 0.2 1],[1 0.7 1]) のステップ応答を示しています。
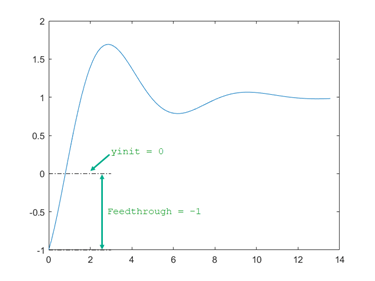
ここで、yinit はゼロ、フィードスルーの値は –1 です。
この引数は、入力としてステップ応答データを指定した場合のみサポートされます。入力が動的システム モデル sys の場合、stepinfo は yinit = 0 を使用してこの値に依存する特性を計算します。
ST — 整定時間のしきい値
0.02 (既定値) | 0 ~ 1 のスカラー
整定時間および過渡時間を定義するためのしきい値。0 ~ 1 のスカラー値として指定します。既定の整定時間と過渡時間の定義 (アルゴリズムを参照) を変更するには、ST を異なる値に設定します。たとえば、誤差が 5% を下回る時点を測定するには ST を 0.05 に設定します。
RT — 立ち上がり時間のしきい値
[0.1 0.9] (既定値) | 2 要素の行ベクトル
立ち上がり時間を定義するためのしきい値。0 ~ 1 の非降順の値からなる 2 要素の行ベクトルとして指定します。既定の立ち上がり時間の定義 (アルゴリズムを参照) を変更するには、RT を異なる値に設定します。たとえば、立ち上がり時間を応答が初期値から定常値までの間で 5% から 95% に上がるまでの時間として定義するには、RT を [0.05 0.95] に設定します。
出力引数
アルゴリズム
ステップ応答 y(t) について、stepinfo は yinit および yfinal に対する特性を計算します。既定では、動的システム モデル sys の場合、stepinfo は yinit = 0 および yfinal = 定常値を使用します。
次の表に、stepinfo による各特性の計算方法を示します。
| ステップ応答の特性 | 説明 |
|---|---|
RiseTime | 応答が yinit から yfinal までの間で 10% から 90% に上がるまでの時間 |
TransientTime | t ≥ T において、誤差 |y(t) – yfinal| ≤ SettlingTimeThreshold × emax となる最初の時間 T (ここで emax は、t ≥ 0 における最大誤差 |y(t) – yfinal|)。 既定では、SettlingTimeThreshold = 0.02 (ピーク誤差の 2%) です。過渡時間によって、過渡ダイナミクスが消滅する速度が測定されます。 |
SettlingTime | t ≥ T において、誤差 |y(t) – yfinal| ≤ SettlingTimeThreshold × |yfinal – yinit| となる最初の時間 T。 既定では、 |
SettlingMin | 応答が立ち上がったときの y (t) の最小値 |
SettlingMax | 応答が立ち上がったときの y (t) の最大値 |
Overshoot | オーバーシュートの割合。正規化された応答 ynorm(t) = (y(t) – yinit)/(yfinal – yinit) を基準として、オーバーシュートは零点と 100 × max(ynorm(t) – 1) のうちの大きい方になります。 |
Undershoot | アンダーシュートの割合。正規化された応答 ynorm(t) を基準として、アンダーシュートは零点と –100 × min(ynorm(t) ) のうちの小さい方になります。 |
Peak | |y(t) – yinit| のピーク値 |
PeakTime | ピーク値が発生する時間 |
バージョン履歴
R2006a で導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)