カメラ センサー構成
単眼カメラ センサーキャリブレーション、イメージ座標系から車両座標系への変換、鳥瞰ビュー イメージの変換
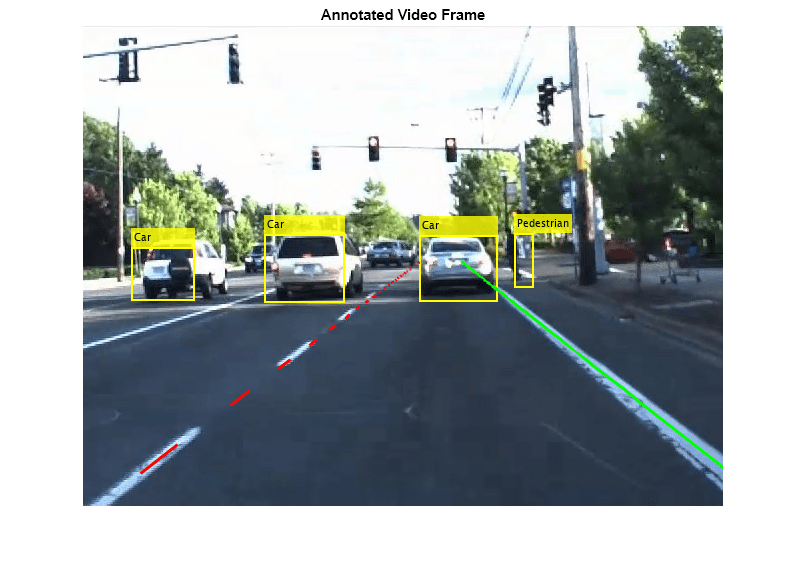
単眼カメラ センサーのビジュアル知覚アルゴリズムを開発する際には、正確なカメラ構成が必要不可欠です。monoCamera オブジェクトを使用して、内部パラメーターと外部パラメーターを定義することで、そのようなセンサーを構成できます。内部パラメーターを取得するには、カメラ キャリブレーター アプリを使用します。外部パラメーターを取得するには、関数 estimateMonoCameraParameters を使用します。構成した monoCamera オブジェクトを使用して、イメージ座標の位置を車両座標の位置に変換できます。こうした変換により、自車の前にある位置までの距離を推定できます。また、monoCamera オブジェクトを使用して鳥瞰ビュー イメージを作成することもできます。これは、カメラ構成を検証するために使用したり、車線検出アルゴリズムの一部として使用したりすることができます。
アプリ
| カメラ キャリブレーター | 単一カメラの幾何学的パラメーターの推定 |
| ステレオ カメラ キャリブレーター | ステレオ カメラの幾何学的パラメーターの推定 |
関数
トピック
- 単眼カメラのキャリブレーション
チェッカーボード パターンを使用して単眼カメラの内部および外部のパラメーターを推定する。
注目の例


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)