このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
シナリオの生成
自動運転アプリケーションでのシナリオ生成とは、全地球測位システム (GPS)、慣性測定ユニット (IMU)、カメラ、および LiDAR の各センサーから記録された実環境車両データから、バーチャル シナリオを作成するプロセスです。Automated Driving Toolbox™ には、シナリオ生成プロセスを自動化する関数とツールが用意されています。センサー データの前処理、道路の抽出、アクターの位置推定、およびアクターの軌跡の取得を行って、実環境シナリオの正確なデジタル ツインを作成します。生成したシナリオをシミュレートし、実環境データに対して自動運転アルゴリズムをテストします。
記録したセンサー データからシナリオを生成するには、アドオン エクスプローラーから Scenario Builder for Automated Driving Toolbox サポート パッケージをダウンロードします。アドオンのダウンロードの詳細については、アドオンの取得と管理を参照してください。
関数
getMapROI | Geographic bounding box coordinates from GPS data (R2022b 以降) |
roadprops | Extract road properties from road network file or map data (R2022b 以降) |
selectActorRoads | Extract properties of roads in path of actor (R2022b 以降) |
updateLaneSpec | Update lane specifications using sensor detections (R2022b 以降) |
actorprops | Generate actor properties from track list (R2022b 以降) |
actorTracklist | Store recorded actor track list data with timestamps (R2023a 以降) |
laneData | Store recorded lane boundary data with timestamps (R2023a 以降) |
laneBoundaryTracker | Track lane boundaries (R2023a 以降) |
laneBoundaryDetector | Detector for lane boundaries in images (R2023a 以降) |
roadrunnerLaneInfo | Generate lane information in RoadRunner HD Map format from lane boundary points (R2023a 以降) |
トピック
- Overview of Scenario Generation from Recorded Sensor Data
Learn the basics of generating scenarios from recorded sensor data.
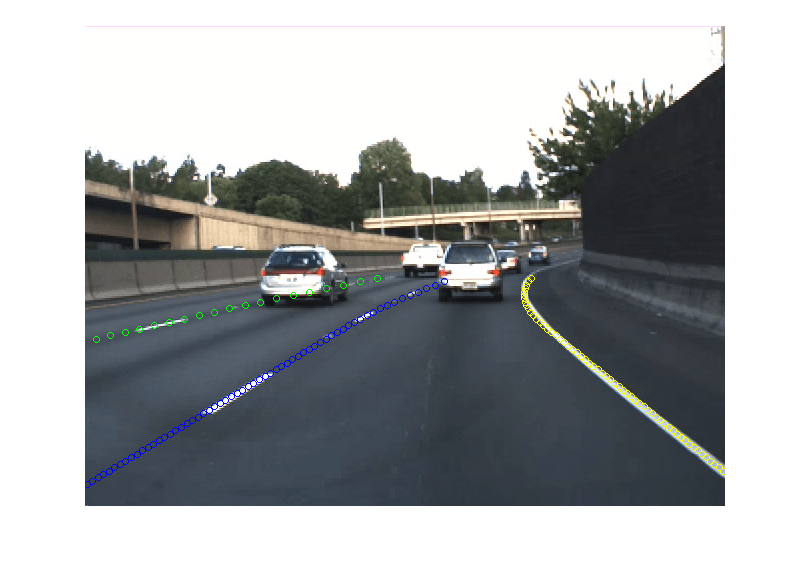
- Preprocess Lane Detections for Scenario Generation
Format lane detection data to update lane specifications for scenario generation.
- Smooth GPS Waypoints for Ego Localization
Create jitter-limited ego trajectory by smoothing GPS and IMU sensor data.
- Generate RoadRunner Scene Using Labeled Camera Images and GPS Data
Generate RoadRunner scene using labeled camera images and GPS data.
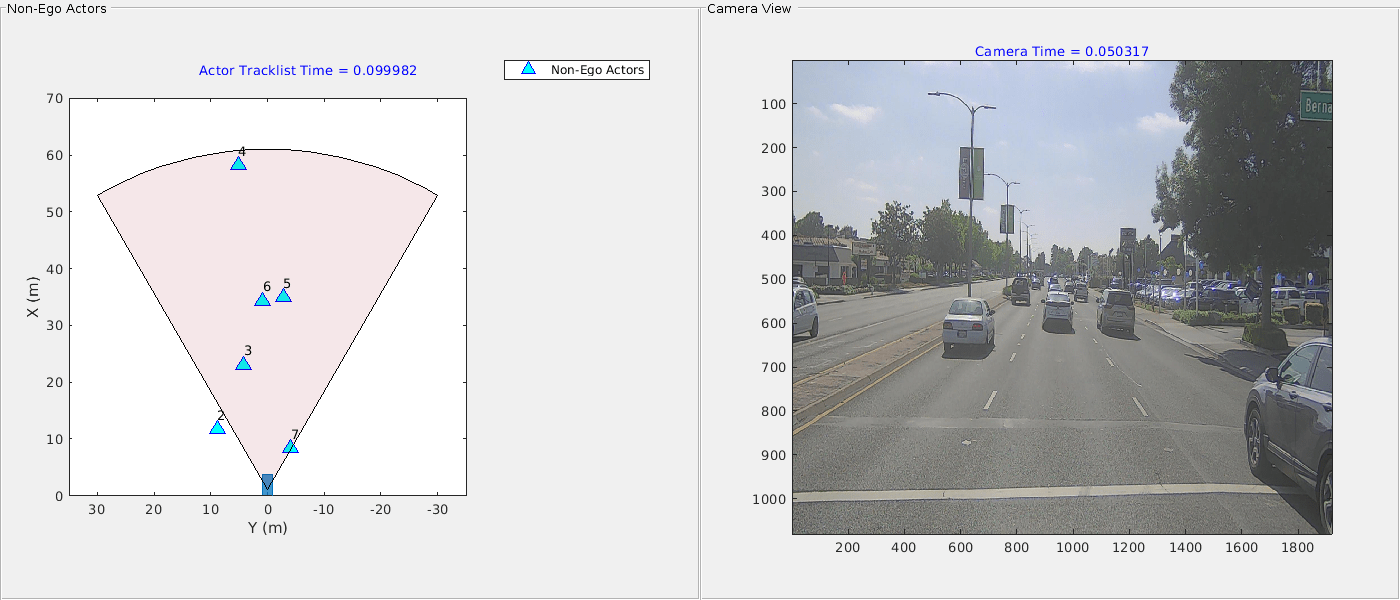
- Generate Scenario from Actor Track List and GPS Data
Generate ASAM OpenSCENARIO® v1.0 file using recorded actor tracklist and GPS data.
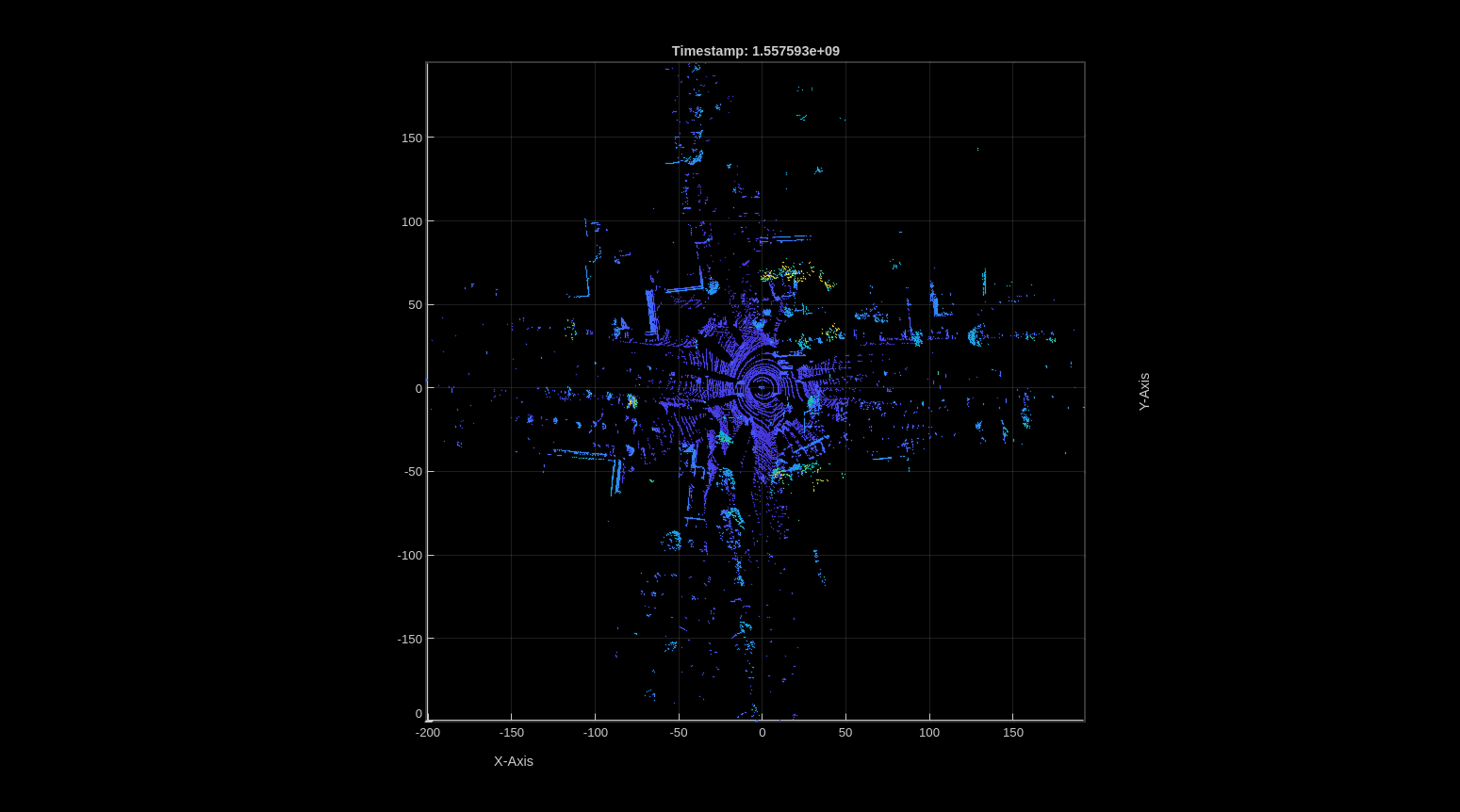
- Generate RoadRunner Scene from Recorded Lidar Data
Generate RoadRunner HD map from recorded lidar data using pretrained deep learning model.
- Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.
- Extract 3D Vehicle Information from Recorded Monocular Camera Data for Scenario Generation
Extract 3D vehicle information from recorded monocular camera data for scenario generation.
注目の例


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)