このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ビジョンおよび LiDAR データを使用した地図作成と位置推定
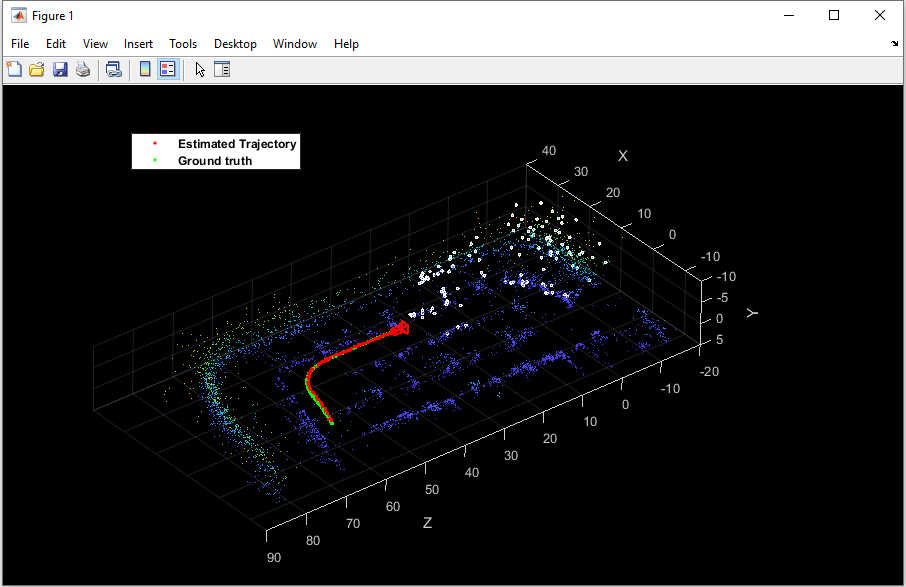
SLAM (自己位置推定と環境地図作成の同時実行) アルゴリズムを使用して、環境地図作成と自車の姿勢推定を同時に行います。SLAM アルゴリズムは、ビジュアル データまたは点群データで使用できます。カメラ イメージ データを使用した visual SLAM の実装の詳細については、MATLAB での Visual SLAM の実装およびDevelop Visual SLAM Algorithm Using Unreal Engine Simulationを参照してください。LiDAR データを使用した点群 SLAM の実装の詳細については、MATLAB での点群 SLAM の実装およびを参照してください。
慣性測定ユニット (IMU) や全地球測位システム (GPS) などのセンサーからの測定値を使用して、ビジュアル データまたは LiDAR データによる地図作成プロセスを改善できます。例については、LiDAR データからのマップの作成を参照してください。
既知のマップが存在する環境では、マップの座標系の原点を基準にして自車の姿勢を推定することで、自車の位置を特定できます。既知のビジュアル マップを使用した位置推定の例については、Visual Localization in a Parking Lotを参照してください。既知の点群マップを使用した位置推定の例については、Lidar Localization with Unreal Engine Simulationを参照してください。
既知のマップが存在しない環境では、ビジュアル データと IMU データを融合することでビジュアル慣性オドメトリを使用して、開始姿勢に対する自車の姿勢を推定できます。例については、Visual-Inertial Odometry Using Synthetic Dataを参照してください。
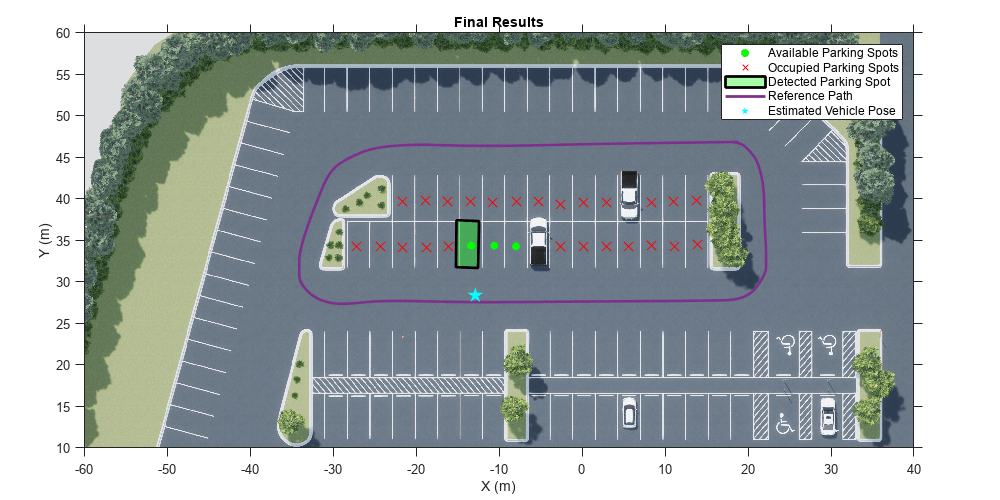
駐車場の空き駐車スポットを検出する地図作成および位置アルゴリズムのアプリケーションについては、Perception-Based Parking Spot Detection Using Unreal Engine Simulationを参照してください。
関数
トピック
- Rotations, Orientations, and Quaternions for Automated Driving
Quaternions are four-part hypercomplex numbers that are used to describe three-dimensional rotations and orientations. Learn how to use them for automated driving applications.
- MATLAB での Visual SLAM の実装
Visual simultaneous localization and mapping (vSLAM) ワークフローと、MATLAB を使用してそれを実装する方法について理解する。
- 単眼の Visual Simultaneous Localization and Mapping
Visual simultaneous localization and mapping (vSLAM)。
- MATLAB での点群 SLAM の実装
点群のレジストレーションと地図作成のワークフローを理解する。
注目の例








You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)