differentiate
Differentiate cfit or sfit
object
Syntax
Description
Note
Use these syntaxes for sfit objects.
[
differentiates the surface fx, fy] = differentiate(FO, X, Y)FO at the points specified by
X and Y and returns the result in
fx and fy.
FO is a surface fit (sfit) object
generated by the fit function.
X and Y must be double-precision arrays
and the same size and shape as each other.
All return arguments are the same size and shape as X and
Y.
If FO represents the surface , then FX contains the derivatives with
respect to x, that is, , and FY contains the derivatives with
respect to y, that is, .
[
computes the first and second derivatives of the surface fit object
fx, fy, fxx, fxy, fyy] = differentiate(FO, ...)FO.
fxx contains the second derivatives with respect to
x, that is, .
fxy contains the mixed second derivatives, that is, .
fyy contains the second derivatives with respect to
y, that is, .
Examples
Find the Derivatives of a Curve Using the differentiate Function
Create a baseline sinusoidal signal.
xdata = (0:.1:2*pi)'; y0 = sin(xdata);
Add response-dependent Gaussian noise to the signal.
noise = 2*y0.*randn(size(y0)); ydata = y0 + noise;
Fit the noisy data with a custom sinusoidal model.
f = fittype('a*sin(b*x)'); fit1 = fit(xdata,ydata,f,'StartPoint',[1 1]);
Find the derivatives of the fit at the predictors.
[d1,d2] = differentiate(fit1,xdata);
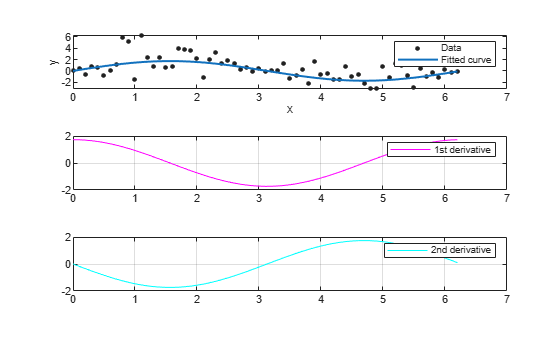
Plot the data, the fit, and the derivatives.
subplot(3,1,1) plot(fit1,xdata,ydata) % cfit plot method subplot(3,1,2) plot(xdata,d1,'m') % double plot method grid on legend('1st derivative') subplot(3,1,3) plot(xdata,d2,'c') % double plot method grid on legend('2nd derivative')
You can also compute and plot derivatives directly with the cfit plot method, as follows:
figure
plot(fit1,xdata,ydata,{'fit','deriv1','deriv2'})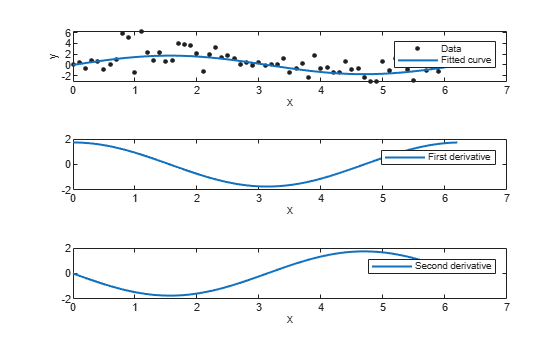
The plot method, however, does not return data on the derivatives, unlike the differentiate method.
Find the Derivatives of a Surface Using the differentiate Function
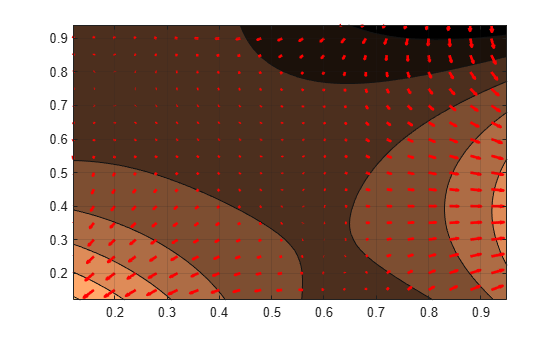
You can use the differentiate method to compute the gradients of a fit and then use the quiver function to plot these gradients as arrows. This example plots the gradients over the top of a contour plot.
Create the derivation points and fit the data.
x = [0.64;0.95;0.21;0.71;0.24;0.12;0.61;0.45;0.46;... 0.66;0.77;0.35;0.66]; y = [0.42;0.84;0.83;0.26;0.61;0.58;0.54;0.87;0.26;... 0.32;0.12;0.94;0.65]; z = [0.49;0.051;0.27;0.59;0.35;0.41;0.3;0.084;0.6;... 0.58;0.37;0.19;0.19]; fo = fit( [x, y], z, 'poly32', 'normalize', 'on' ); [xx, yy] = meshgrid( 0:0.04:1, 0:0.05:1 );
Compute the gradients of the fit using the differentiate function.
[fx, fy] = differentiate( fo, xx, yy );
Use the quiver function to plot the gradients.
plot( fo, 'Style', 'Contour' ); hold on h = quiver( xx, yy, fx, fy, 'r', 'LineWidth', 2 ); hold off colormap( copper )
If you want to use derivatives in an optimization, you can, for example, implement an objective function for fmincon as follows.
function [z, g, H] = objectiveWithHessian( xy )
% The input xy represents a single evaluation point
z = f( xy );
if nargout > 1
[fx, fy, fxx, fxy, fyy] = differentiate( f, xy );
g = [fx, fy];
H = [fxx, fxy; fxy, fyy];
end
end
Input Arguments
Output Arguments
Tips
For library models with closed forms, the toolbox calculates derivatives analytically. For all other models, the toolbox calculates the first derivative using the centered difference quotient
where x is the value at which the toolbox calculates the
derivative, is a small number (on the order of the cube root of eps), is fun evaluated at , and is fun evaluated at .
The toolbox calculates the second derivative using the expression
The toolbox calculates the mixed derivative for surfaces using the expression
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)