getDelayModel
内部遅延の状態空間表現
説明
例
遅延のない状態空間モデルと内部遅延の取得
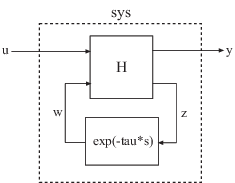
内部遅延をもつ次の閉ループ システムを遅延のない成分と内部遅延を表す成分に分解します。
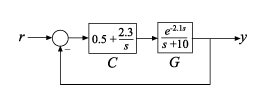
r から y への閉ループ モデル sys を作成します。
G = tf(1,[1 10],'InputDelay',2.1);
C = pid(0.5,2.3);
sys = feedback(C*G,1);sys は、入力遅延のあるプラントでフィードバック ループを閉じたことにより内部遅延が生じた状態空間 (ss) モデルです。
sys を遅延のない状態空間モデルと内部遅延の値に分解します。
[H,tau] = getDelayModel(sys);
内部遅延がプラントにおける元の入力遅延と一致することを確認します。
tau
tau = 2.1000
入力引数
出力引数
バージョン履歴
R2006a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)