replaceBlock
一般化モデルの制御設計ブロックの置換または更新
構文
説明
Mnew = replaceBlock(M,blockvalues)blockvalues のフィールド名と値としてブロック名と置換値を指定します。
例
数値による制御設計ブロックの置き換え
この例は、ゲインのみ、数値 PI コントローラー、または調整可能なコントローラーの現在の値によって一般化 LTI モデルで調整可能な PID コントローラー (tunablePID) を置き換える方法を示します。
一般化 LTI モデルを作成
次のシステムの一般化 LTI モデルを作成します。
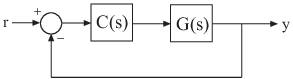
ここで、プラントは 、 は調整可能な PID コントローラーです。
G = zpk(1,[-1,-1,-1],1);
C = tunablePID(C='pid');
Try = feedback(G*C,1)Generalized continuous-time state-space model with 1 outputs, 1 inputs, 4 states, and the following blocks: C: Tunable PID controller, 1 occurrences. Type "ss(Try)" to see the current value and "Try.Blocks" to interact with the blocks.
PID コントローラーをゲイン値のみで置き換え
C をゲインのみの 5 で置き換えます。
T1 = replaceBlock(Try,C=5);
T1 は feedback(G*5,1) と等価のssモデルです。
PID コントローラーを数値 PI コントローラーで置き換え
5 の比例ゲインおよび 0.1 の積分ゲインのある PI コントローラーによって C を置き換えます。
C2 = pid(5,0.1); T2 = replaceBlock(Try,C=C2);
T2 は feedback(G*C2,1) と等価の ss モデルです。
PID コントローラーを現在値で置き換え
現在の (ノミナル) 値によって C を置き換えます。
T3 = replaceBlock(Try,C=[]);
T3 は、C が getValue(C) によって置き換えられている ss モデルです。
値のグリッドでの調整可能なモデルのサンプリング
以下で表される 2 次フィルターについて考えます。
減衰定数 および固有振動数 の値を変化させてこのフィルターをサンプリングします。 と の調整可能な要素を使用してフィルターの調整可能なモデルを作成します。
wn = realp('wn',3); zeta = realp('zeta',0.8); F = tf(wn^2,[1 2*zeta*wn wn^2])
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 2 states, and the following blocks: wn: Scalar parameter, 5 occurrences. zeta: Scalar parameter, 1 occurrences. Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
サンプル値のグリッドを作成します。
wnvals = [3;5]; zetavals = [0.6 0.8 1.0]; [wngrid,zetagrid] = ndgrid(wnvals,zetavals); Fsample = replaceBlock(F,'wn',wngrid,'zeta',zetagrid); size(Fsample)
2x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
ndgrid コマンドは、パラメーターの組み合わせから成る 2 行 3 列のフル グリッドを作成します。したがって、Fsample は状態空間モデルの 2 行 3 列の配列です。配列の各要素は、対応する (wn, zeta) ペアで評価された F を表す状態空間モデルです。たとえば、Fsample(:,:,2,3) には wn = 5 と zeta = 1.0 があります。
damp(Fsample(:,:,2,3))
Pole Damping Frequency Time Constant
(rad/seconds) (seconds)
-5.00e+00 1.00e+00 5.00e+00 2.00e-01
-5.00e+00 1.00e+00 5.00e+00 2.00e-01
入力引数
出力引数
ヒント
replaceBlockを使用して、一般化 LTI モデルをパラメーターのグリッドにわたってサンプリングすることでパラメーターの調査を実行したり、調整可能なブロックの具体的な値に対して調整可能なモデルを評価したりすることができます。同時サンプリングなどの制御設計ブロックをサンプリングする追加オプションには、
sampleBlockを使用します。制御設計ブロックのサンプルをランダムに取得するには、
rsampleBlockを参照してください。
バージョン履歴
R2011a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)