initial
状態空間モデルの初期状態に対するシステム応答
構文
説明
状態空間モデルおよびスパース状態空間モデルについて、initial は初期状態 xinit に対するシステムの自由応答 y を計算します。
連続時間:
離散時間:
線形時変状態空間モデルまたは線形パラメーター変動状態空間モデルの場合、initial は初期状態 xinit、初期パラメーター pinit (LPV モデル)、およびオフセット値に保持される入力 (u(t) = u0(t) または u(t) = u0(t,p)) を使用して応答を計算します。これは、局所的な線形ダイナミクスの初期条件応答に対応します。
initial( は sys,xinit,___)sys の初期応答をプロットします。この構文は、initialplot(sys,__) と等価です。追加のプロット カスタマイズ オプションが必要な場合は、代わりに initialplot を使用してください。
例
初期条件応答プロット
この例では、5 つの状態をもつランダムな状態空間モデルを生成し、初期状態に対するシステム応答のプロットを作成します。
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
initial(sys,x0)
初期条件に対する状態空間モデルの応答
次の状態空間モデルの応答をプロットします。
次の初期条件を取ります。
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); initial(sys,x0)

MIMO システムの初期条件応答プロット
次の 2 つの入力、2 つの出力の動的システムについて考えます。
初期条件応答プロットは状態空間モデルに対してのみサポートされているため、sys を状態空間形式に変換します。
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
結果の状態空間モデルには 4 つの状態があります。そのため、初期条件ベクトルに 4 つの要素を与えます。
x0 = [0.3,0.25,1,4];
初期条件応答プロットを作成します。
initial(sys,x0);

結果のプロットには、sys の各出力について 1 つ、計 2 つのサブプロットが含まれています。
指定された時間での初期条件応答プロット
この例では、次の零点-極-ゲイン モデルの初期条件応答を調べて、プロットを tFinal = 15 秒に制限します。
initial は状態空間モデルのみをサポートしているため、まず zpk モデルを ss モデルに変換します。
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
次に、初期条件応答プロットを作成します。
initial(sys,x0,tFinal);

複数システムの初期条件応答
この例では、3 つの動的システムの初期条件応答をプロットします。
まず、3 つのモデルを作成し、初期条件を与えます。すべてのモデルは状態数が同じでなければなりません。
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];5 秒にわたる時間ベクトル t を使用して、3 つのモデルの初期条件応答をプロットします。
t = 0:0.1:5; initial(sys1,'r--',sys2,'b',sys3,'g-.',x0,t)

状態空間モデルの初期条件応答データ
2 つの状態をもつ次の状態空間モデルの初期条件応答データを抽出します。
次の初期条件を使用します。
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); [y,tOut,x] = initial(sys,x0);
配列 y は、時間サンプル数 (tOut の長さ) と同じ行数、および出力数と同じ列数をもちます。同様に配列 x は、時間サンプル数 (tOut の長さ) と等しい行数、および状態数と同じ列数をもちます。
時間が指定された初期条件応答データ
この例では、6 つの状態と、3 出力 2 入力をもつ状態空間モデルの初期条件応答データを抽出します。
まず、モデルを作成して初期条件を指定します。
rng('default');
sys = rss(6,3,2);
x0 = [0.1,0.3,0.05,0.4,0.75,1];15 秒にわたる時間ベクトル t を使用して、モデルの初期条件応答を抽出します。
t = 0:0.1:15; [y,tOut,x] = initial(sys,x0,t);
配列 y は、時間サンプル数 (tOut の長さ) と同じ行数、および出力数と同じ列数をもちます。同様に配列 x は、時間サンプル数 (tOut の長さ) と等しい行数、および状態数と同じ列数をもちます。
線形パラメーター変動状態空間モデルの初期応答
この例では、throttleLPV.m に、15 度から 90 度の開範囲で線形的に動作する非線形エンジン スロットルのダイナミクスが定義されています。
lpvss を使用してモデルを作成します。このモデルは、モデルの最初の状態であるスロットル角度でパラメーター化されます。
c0 = 50;
k0 = 120;
K0 = 1e4;
b0 = 4e4;
yf = 15*K0/(k0+K0);
Ts = 0;
sys = lpvss("x1",@(t,p) throttleLPV(p,c0,k0,b0,K0),Ts,0,15);このモデルの初期応答を軌跡 に沿って計算できます。
小さい角速度で線形範囲の下限から開始した場合の応答を計算します。
pFcn = @(t,x,u)x(1);
x0 = [15;10];
p0 = x0(1);
t = linspace(0,0.6,500);
initial(sys,{x0,p0},t,pFcn)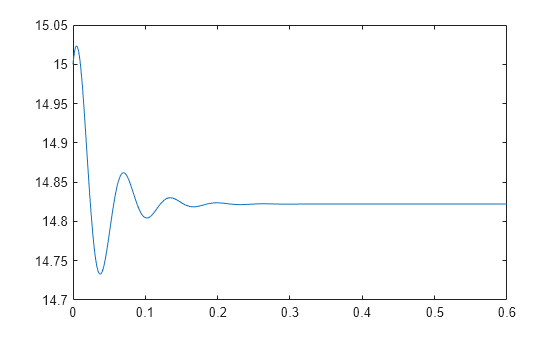
線形範囲の上限にヒットするのに十分な角速度で線形範囲の下限から開始した場合の応答を計算します。
x0 = [15;5e3];
p0 = x0(1);
t = linspace(0,1,1000);
initial(sys,{x0,p0},t,pFcn)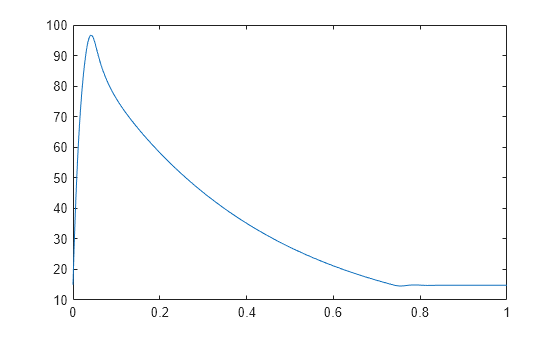
データ関数を表示します。
type throttleLPV.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = throttleLPV(x1,c,k,b,K) % LPV representation of engine throttle dynamics. % Ref: https://www.mathworks.com/help/sldo/ug/estimate-model-parameter-values-gui.html % x1: scheduling parameter (throttle angle; first state of the model) % c,k,b,K: physical parameters A = [0 1; -k -c]; B = [0; b]; C = [1 0]; D = 0; E = []; Delays = []; x0 = []; u0 = []; y0 = []; % Nonlinear displacement value NLx = max(90,x1(1))-90+min(x1(1),15)-15; % Capture the nonlinear contribution as a state-derivative offset dx0 = [0;-K*NLx];
入力引数
出力引数
バージョン履歴
R2006a より前に導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)