freqsep
低速/高速分解
構文
説明
[ は、G1,G2] = freqsep(G,[fmin,fmax])G1 に固有振動数 fmin ≤ ωn ≤ fmax のすべてのモードが含まれ、G2 に残りのモードが含まれる分解を計算します。 (R2023b 以降)
例
モデルの高速ダイナミクスと低速ダイナミクスへの分解
動的システム モデルを読み込みます。
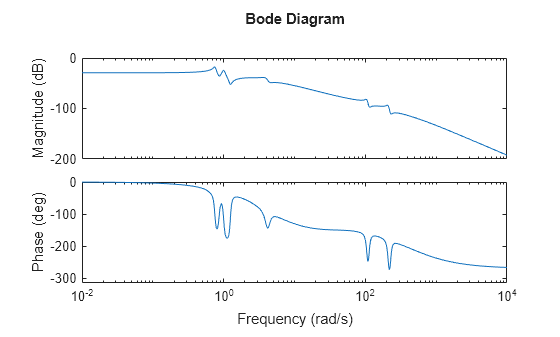
load numdemo Pd bode(Pd)

Pd には 4 つの複素数の極と 1 つの実極があります。ボード線図には 210 rad/s 付近の共振と 10,000 rad/s 未満の高周波共振が示されています。
このモデルを 1000 rad/s 付近で分解してこれら 2 つの共振を分離します。
[Gs,Gf] = freqsep(Pd,10^3); bode(Pd,Gs,Gf) legend('original','slow','fast','Location','Southwest')

ボード線図には、低速成分 Gs に低周波数の共振のみが含まれることが示されます。また、この成分は元のモデルの DC ゲインと一致します。高速成分 Gf には高周波数の共振が含まれ、高周波における元のモデルの応答に一致します。2 つの成分の和 Gs+Gf は元のモデルになります。
許容誤差の調整による近傍モードの分離
モデルを、間隔が狭い極の間で低速成分と高速成分に分解します。
次のシステムには、実極と複素共役極が含まれ、すべて s = -2 の近くにあります。
G = zpk(-.5,[-1.9999 -2+1e-4i -2-1e-4i],10);
低速成分に実極、高速成分に複素共役極が含まれるように、モデルを約 2 rad/s で分解します。
[Gs,Gf] = freqsep(G,2);
Warning: One or more fast modes could not be separated from the slow modes. To force separation, relax the accuracy constraint by increasing the "SepTol" factor (see "freqsepOptions" for details).
これらの極は間隔が狭すぎて freqsep では分離できません。分離できるように相対許容誤差を増加させます。
[Gs,Gf] = freqsep(G,2,SepTol=5e10);
今度は freqsep によりダイナミクスが分離されます。
slowpole = pole(Gs)
slowpole = -1.9999
fastpole = pole(Gf)
fastpole = 2×1 complex
-2.0000 + 0.0001i
-2.0000 - 0.0001i
周波数範囲のモードを取得するための状態空間モデルの分解
この例では、モデルを分解し、freqsep を使用して指定した周波数範囲のモードを保持する方法を説明します。
モデル Gms を読み込み、その周波数応答を調べます。
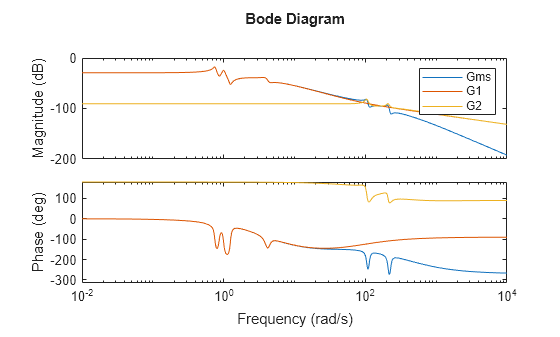
load modeselect Gms bodeplot(Gms)
freqsep を使用して、周波数範囲 0.1 rad/s ~ 50 rad/s のダイナミクスを保持します。
[G1,G2] = freqsep(Gms,[0.1,50]);
この分解では、出力 G1 には固有振動数が [0.1,50] の範囲内であるすべての極が含まれ、G2 には残りの極が含まれます。
bodeplot(Gms,G1,G2) legend
入力引数
出力引数
バージョン履歴
R2014a で導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)