リコー、ロボット駆動用モジュールの検討に Simscape Multibodyを用いた詳細モデル活用
「Simscape Multibodyを導入して、ロボット向け駆動関節のモデリングを直感的かつ簡単に行うことができました。アニメーションにより動作が可視化されますので、モデルのレビュー及び解析が容易にでき、重宝しております。」
主な成果
- CADを活用することでモデル作成を半日で完了
- 非線形性を含む実機特性をシミュレーションで再現
- 3Dの可視化機能を用いて妥当性検証を効率化
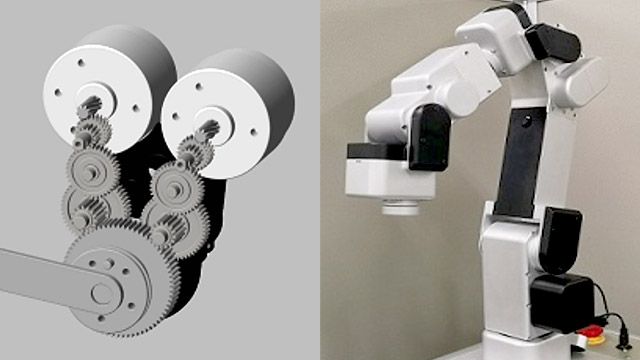
ダブルモータ減速機のSimscape Multibodyモデル(左)、ロボット実機(右)
リコーは、モデルベースデザインによる試作レスでの制御開発・検証の推進を目的として、ロボット向け駆動関節として使用しているダブルモータ減速機のモデリングにSimscape Multibodyを導入しました。最終的にCADデータからモデルのブロック線図作成を半日で実施することができ、実機の特性をシミュレーションで概ね再現することができました。
ダブルモータ減速機は、複数モータかつ多段ギアで構成されるため、マルチボディかつ非線形成分が多く、従来のモデリング手法では特性の再現が容易でない部分がありました。Simscape Multibodyを利用することで、マルチボディなシステムでも直感的に接続及び非線形成分をモデル化することができました。アニメーションにより動作が可視化できることも妥当性の検証に役立ちました。また、3DCADデータからマルチボディモデルをインポートできるため、CADと連携して効率よくモデル作成ができました。
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します: United States
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)