Modeling Multidomain Physical Systems
Physical modeling enables you to produce models that can be easily reused and shared with other engineers. Importing data and models from other environments helps ensure the accuracy of your models. By integrating those models with control and signal processing algorithms, you can test for integration errors early in the design process.

Explore Products for Physical Modeling
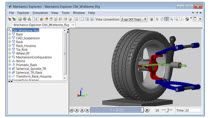
Import Data from Multiple Sources, Including CAD
You can import data and CAD models, including mass, inertia, constraints, and 3-D geometry, into Simscape Multibody™ using Simscape Multibody Link. To refine your model, you import measurement data into MATLAB® and then use Simulink Design Optimization™ to automatically adjust parameter values until your simulation results match the measurement data. By importing models and data from multiple sources, you build accurate, up-to-date physical models.
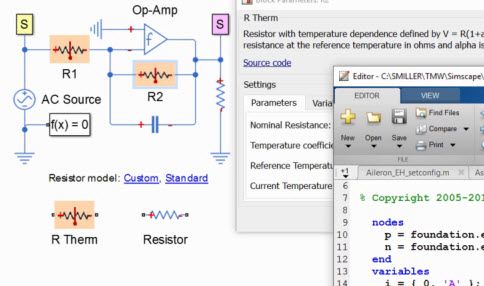
Create and Reuse Intuitive System-Level Models
MathWorks physical modeling products provide libraries of components that you can use as is or modify to suit your needs. You assemble these components into a physical network with connections that represent physical domains (including mechanical, electrical, and hydraulic) instead of using an input/output-based or signal-based approach. With the Simscape™ language, you can create your own physical domains and components with physical ports in addition to input and output ports. The resulting model is easier to interpret and reuse because it reflects the structure of the system that you are modeling, rather than a purely mathematical depiction of the system.


Integrate the Physical System and Controller in a Single Environment
Your plant models connect directly to control and signal processing algorithms created in Simulink® and state machines modeled in Stateflow®. The control tools in the Simulink environment enable you to design and tune compensators. Working in a common environment helps different teams developing mechatronic and other complex systems avoid the pain of cosimulation and uncover integration issues earlier in the design process.

また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)