設計、シミュレーション、展開。
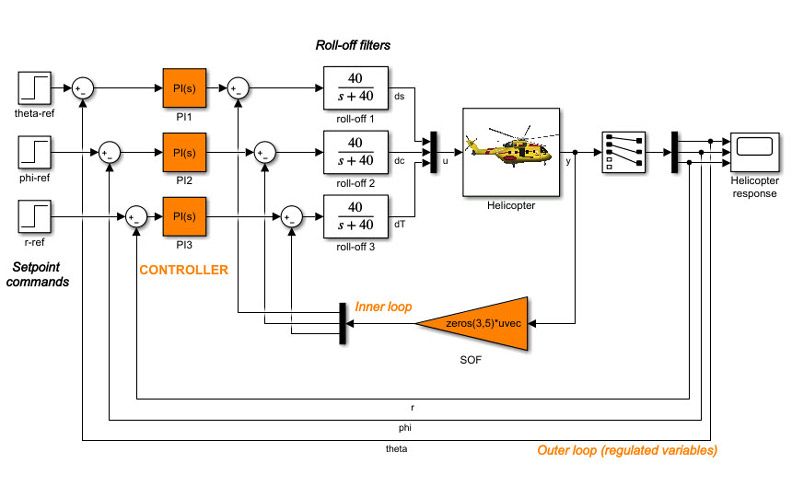
Simulink のブロック線図環境を使用して、マルチドメインモデルによりシステムを設計し、ハードウェア移行前にシミュレーションを実行して、コードを記述することなく展開します。
ご質問はありますか? 営業へのお問い合わせ.
Simulink のブロック線図環境を使用して、マルチドメインモデルによりシステムを設計し、ハードウェア移行前にシミュレーションを実行して、コードを記述することなく展開します。
ご質問はありますか? 営業へのお問い合わせ.
複雑なシステムの開発を変革するために、市場をリードする企業では、プロセス全体を通してモデルを体系的に使用するモデルベースデザイン (MBD、モデルベース開発) を導入しています。

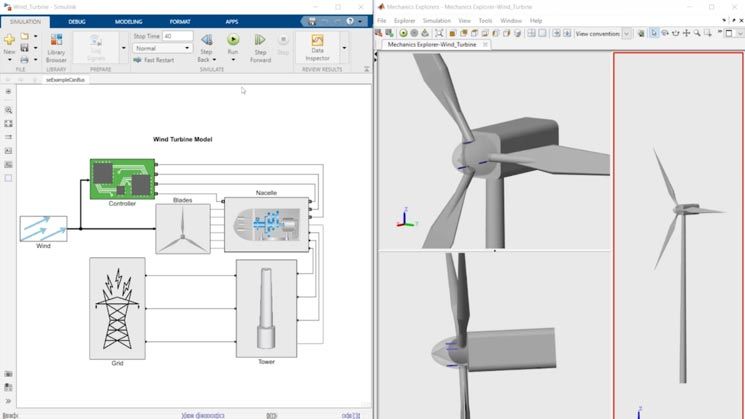
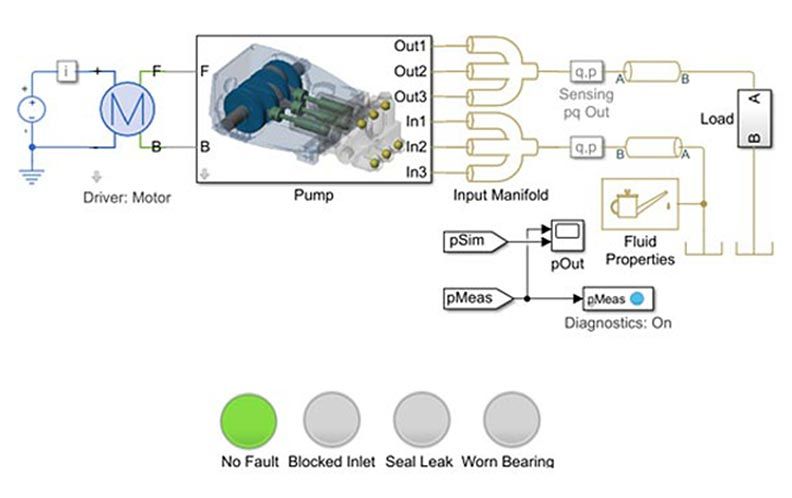
マルチドメインのモデル化とシミュレーションを使用して、広範な設計空間を探索し、システムを早期にテストします。

モデルベース システムズ エンジニアリング (MBSE) は、モデルを適用してシステムのライフサイクル全体をサポートする開発手法です。Simulink は、要件やシステムアーキテクチャから詳細なコンポーネント設計、実装、およびテストに至るまでの、開発の各段階の橋渡しをします。
アジャイル ソフトウェア開発は、継続的インテグレーションとチームのコラボレーションを重視し、短期間の反復サイクルを使用することで、より迅速に顧客に価値を提供することができます。シミュレーション、自動テスト、コード生成により開発サイクルを短縮し、アジャイルチームを成功に導くことができます。


MATLAB および Simulink を併用することで、テキストベースのプログラミングとグラフィカルなプログラミングを単一の環境で組み合わせて活用することができます。
MATLAB の知識を適用して、以下を実行できます。

「Simulink は特に開発プロセスの 2 つの段階において役に立ちました。まず開発初期には、Simulink を活用してアイデアを試作し、どのように機能するかを可視化することができました。そして、コードを生成して実車テストを実施した後にも、シミュレーション実行、設計の調整、コード再生成を繰り返すことができました。」
Jonny Andersson, Scania
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
ヨーロッパ
アジア太平洋地域