Simulink Control Design では、 Simulink でモデル化された制御システムの設計および解析を行うことができます。また、PID コントローラーをはじめ、任意の SISO および MIMO 制御アーキテクチャを自動調整できます。PID 自動調整を組み込みソフトウェアに展開すると、PID ゲインをリアルタイムで自動計算できます。また、変化するプラントおよび外乱のダイナミクスにコントローラーを適応させなければならないアプリケーションの場合、アクティブな外乱の抑制制御、極値探索制御、およびモデル規範形適応制御アルゴリズムを実装することもできます。
操作点を探索し、さまざまな操作条件で Simulink モデルの線形化を厳密に計算できます。Simulink Control Design には、モデルを変更することなく、シミュレーションに基づいて周波数応答を計算するツールが用意されています。
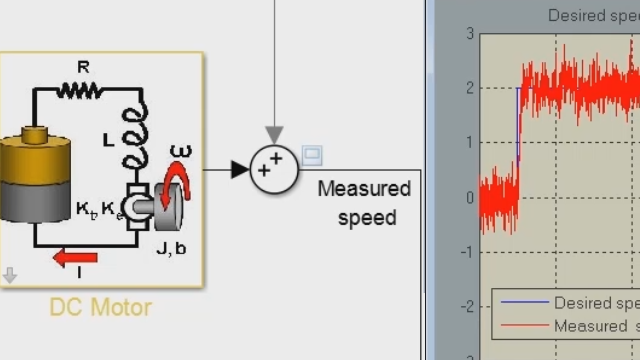
PID コントローラーの調整
PID 調整器アプリを使用して、Simulink モデルで PID コントローラーを自動的に調整します。Closed-Loop PID Autotuner ブロックから C コードを生成することで、組み込みハードウェアに PID 調整アルゴリズムを展開して実行します。
ドキュメンテーション | 例
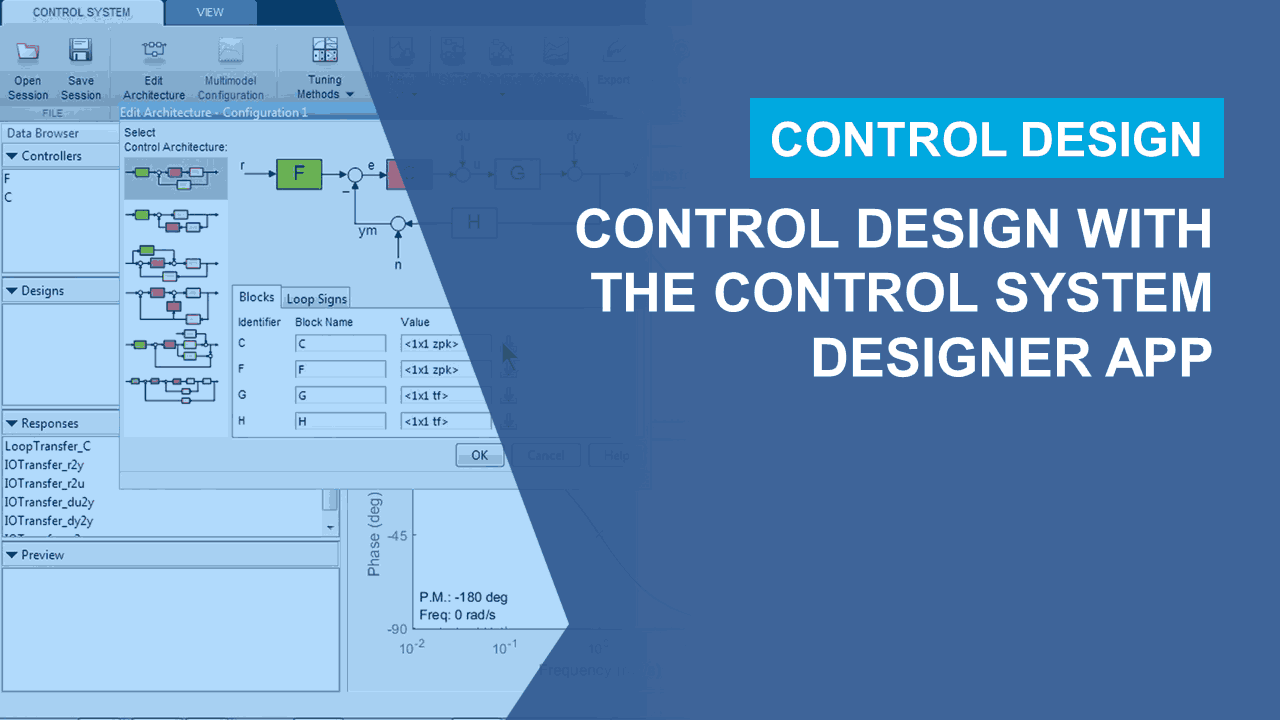
古典制御設計
制御システム デザイナー アプリによりグラフィカルな自動調整ツールを使用して、Simulink で SISO 制御ループを調整します。
ドキュメンテーション | 例

マルチループの多目的調整
制御システム調整器アプリを使用して、時間と周波数領域の設計要件を満たすように Simulink でモデル化された任意の SISO および MIMO 分散制御構造を自動調整します。
ドキュメンテーション | 例
ゲイン スケジューリング
システムの動作範囲全体の性能要件を満たすように、非線形または時変プラントのゲイン スケジュール コントローラーを自動調整します。
ドキュメンテーション | 例

学習ベースの制御
アクティブな外乱の抑制制御、極値探索制御、モデル規範形適応制御、および制約条件の適用のための Simulink ブロックを使用して、データ駆動型の学習ベースの制御手法を実装します。
ドキュメンテーション | 例

操作点
仕様やシミュレーション時間を使用して Simulink モデルの操作点を探索します。定常状態マネージャーアプリを使用して、状態、入力、出力の仕様からモデルを対話的に平衡化します。
ドキュメンテーション | 例

線形化
モデル線形化器アプリを使用して、連続、離散、およびマルチレートの Simulink モデルを線形化します。LinearizationAdvisor オブジェクトを使用して、一般的な線形化の問題を特定し、修正します。
ドキュメンテーション | 例
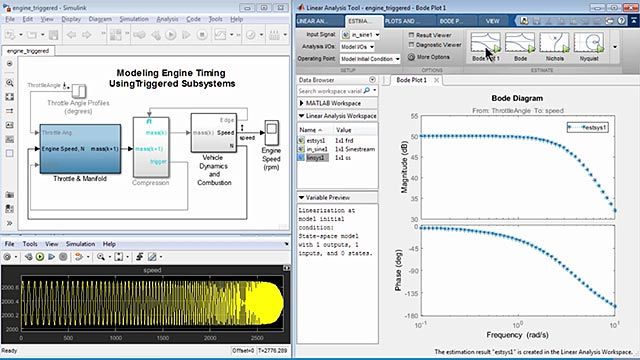
周波数応答の推定
周波数応答を推定し、入出力データを使用して Simulink モデルの周波数領域特性を調べます。推定アルゴリズムを、物理プラントのリアルタイム推定用の組み込みアプリケーションとして展開します。
ドキュメンテーション | 例
リファレンス アプリケーション
飛行制御、パワー エレクトロニクス、ロボティクス、およびその他のアプリケーション向けのリファレンス アプリケーションの例を使用して、Simulink でモデル化されたシステムのコントローラーを設計および解析します。
ドキュメンテーション | 例
製品リソース:

「MathWorks のツールが提供する統合環境を使用して、設計プロセスを簡素化し、顧客が求める革新的な技術的機能の開発を実現することができました。」
Laurence Lane, Haldex
あなたは学生ですか?
ご所属の学校にはすでに Campus-Wide License が導入されていて、MATLAB、Simulink、その他のアドオン製品を利用できる可能性があります。
次のトピック
パネルナビゲーション

ソリューション
制御システム

パネルナビゲーション

チュートリアル
Simulink による制御設計入門
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)