このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
vision.TemplateMatcher
イメージ内でのテンプレートの検出
説明
イメージ内でテンプレートを検出します。
vision.TemplateMatcherオブジェクトを作成し、そのプロパティを設定します。関数と同様に、引数を指定してオブジェクトを呼び出します。
System object の機能の詳細については、System object とはを参照してください。
作成
説明
tMatcher = vision.TemplateMatchertMatcher を返します。このオブジェクトは、イメージの内部全体でテンプレートを 1 ピクセルの増分でシフトして、テンプレートのマッチングを実行します。
tMatcher = vision.TemplateMatcher(Name,Value)tMatcher = vision.TemplateMatcher('Metric','Sum of absolute differences') です。
プロパティ
使用法
構文
説明
入力引数
出力引数
オブジェクト関数
オブジェクト関数を使用するには、System object™ を最初の入力引数として指定します。たとえば、obj という名前の System object のシステム リソースを解放するには、次の構文を使用します。
release(obj)
例
映像安定化
この例では、ビデオ ストリームからカメラの動きの影響を排除する方法を説明します。
はじめに
この例では、まず追跡のターゲットを定義します。今の場合は自動車の後面とナンバー プレートです。また、動的な探索領域を設定しますが、その位置は、最後の既知のターゲット位置によって決まります。この領域内のみでターゲットを探索しますが、これによって、ターゲットの特定に必要な計算量が減ります。後続の各ビデオ フレームで、前のフレームと比べてターゲットがどれだけ動いたかを判定します。この情報を使用して望ましくないカメラの並進を排除し、画面の安定したビデオを生成します。
初期化
マルチメディア ファイルからビデオを読み取る System object™ を作成します。出力を、強度のみのビデオになるように設定します。
% Input video file which needs to be stabilized. filename = "shaky_car.avi"; hVideoSource = VideoReader(filename);
ビデオ フレーム内におけるターゲットの最適一致の位置を計算する、テンプレート マッチング用 System object を作成します。この位置を使用して、連続したビデオ フレーム間の平行移動を求めます。
hTM = vision.TemplateMatcher("ROIInputPort", true, ... "BestMatchNeighborhoodOutputPort", true);
元のビデオと安定化したビデオを表示する System object を作成します。
hVideoOut = vision.VideoPlayer("Name", "Video Stabilization"); hVideoOut.Position(1) = round(0.4*hVideoOut.Position(1)); hVideoOut.Position(2) = round(1.5*(hVideoOut.Position(2))); hVideoOut.Position(3:4) = [650 350];
ここで、処理ループで使用されるいくつかの変数を初期化します。
pos.template_orig = [109 100]; % [x y] upper left corner pos.template_size = [22 18]; % [width height] pos.search_border = [15 10]; % max horizontal and vertical displacement pos.template_center = floor((pos.template_size-1)/2); pos.template_center_pos = (pos.template_orig + pos.template_center - 1); W = hVideoSource.Width; % Width in pixels H = hVideoSource.Height; % Height in pixels BorderCols = [1:pos.search_border(1)+4 W-pos.search_border(1)+4:W]; BorderRows = [1:pos.search_border(2)+4 H-pos.search_border(2)+4:H]; sz = [W, H]; TargetRowIndices = ... pos.template_orig(2)-1:pos.template_orig(2)+pos.template_size(2)-2; TargetColIndices = ... pos.template_orig(1)-1:pos.template_orig(1)+pos.template_size(1)-2; SearchRegion = pos.template_orig - pos.search_border - 1; Offset = [0 0]; Target = zeros(18,22); firstTime = true;
ストリーム処理ループ
以下は、上記でインスタンス化したオブジェクトを使用して入力ビデオを安定化する、メインの処理ループです。
while hasFrame(hVideoSource) input = im2gray(im2double(readFrame(hVideoSource))); % Find location of Target in the input video frame if firstTime Idx = int32(pos.template_center_pos); MotionVector = [0 0]; firstTime = false; else IdxPrev = Idx; ROI = [SearchRegion, pos.template_size+2*pos.search_border]; Idx = hTM(input,Target,ROI); MotionVector = double(Idx-IdxPrev); end [Offset, SearchRegion] = updatesearch(sz, MotionVector, ... SearchRegion, Offset, pos); % Translate video frame to offset the camera motion Stabilized = imtranslate(input, Offset, "linear"); Target = Stabilized(TargetRowIndices, TargetColIndices); % Add black border for display Stabilized(:, BorderCols) = 0; Stabilized(BorderRows, :) = 0; TargetRect = [pos.template_orig-Offset, pos.template_size]; SearchRegionRect = [SearchRegion, pos.template_size + 2*pos.search_border]; % Draw rectangles on input to show target and search region input = insertShape(input, "rectangle", [TargetRect; SearchRegionRect],... "Color", "white"); % Display the offset (displacement) values on the input image txt = sprintf("(%+05.1f,%+05.1f)", Offset); input = insertText(input(:,:,1),[191 215],txt,"FontSize",16, ... "TextColor", "white", "BoxOpacity", 0); % Display video hVideoOut([input(:,:,1) Stabilized]); end

まとめ
MATLAB® コマンド ラインから Computer Vision Toolbox™ の機能を使用すると、映像安定化のような複雑なシステムを簡単に実装できます。
付録
この例では次の補助関数が使用されています。
アルゴリズム
テンプレート マッチングは一般に、大きいイメージ内で小さい領域を見つける場合に使用されます。領域はテンプレート イメージによって指定されます。テンプレート イメージは入力イメージと同じ大きさにすることができますが、入力イメージより小さくするのが一般的です。
オブジェクトは、イメージの左上隅に対する最適一致の座標を出力します。位置の [x y] 座標は、テンプレートの中心に対応します。ピクセル値が奇数に指定されたテンプレートを使用する場合、オブジェクトはテンプレートの中心を使用します。ピクセル値が偶数に指定されたテンプレートを使用する場合、オブジェクトは中心位置の左上のピクセルを使用します。次の表は、オブジェクトが奇数と偶数のテンプレートの位置 (LOC) をどのように出力するかを示します。
| テンプレート内のピクセル数が奇数の場合 | テンプレート内のピクセル数が偶数の場合 |
|---|---|
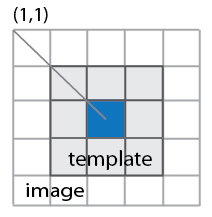 | 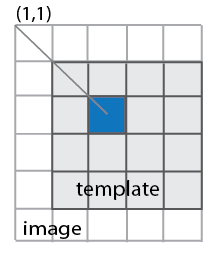 |
拡張機能
バージョン履歴
R2012a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)