このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
findNeighborsInRadius
点群内の点の半径内にある近傍の検索
構文
説明
[ は、入力点群のクエリ点の半径内にある近傍を返します。入力点群は、深度カメラによって生成された、オーガナイズド点群です。クエリ点の半径内の近傍は、高速な近似近傍探索アルゴリズムを使用して決定されます。 indices,dists] = findNeighborsInRadius(ptCloud,point,radius,camMatrix)
関数はカメラ射影行列 camMatrix を使用して隣接する点の間の関係を把握するため、探索が高速化されます。ただし、結果の精度は Kd 木ベースのアプローチと比べて劣ります。
メモ
この構文では、RGB-D センサーによって生成された、オーガナイズド点群データのみがサポートされます。
estimateCameraMatrixを使用して、指定された点群データのカメラ射影行列を推定できます。
[ は、前の構文の入力引数に加えて、名前と値のペアの引数を 1 つ以上使用してオプションを指定します。indices,dists] = findNeighborsInRadius(___,Name,Value)
例
点群内の半径近傍の検索
一連の 3 次元座標点をワークスペースに読み込みます。
load('xyzPoints.mat');点群オブジェクトを作成します。
ptCloud = pointCloud(xyzPoints);
近傍を識別するクエリ点と半径を指定します。
point = [0,0,3]; radius = 0.5;
指定された半径内にある点のインデックスと距離を取得します。
[indices,dists] = findNeighborsInRadius(ptCloud,point,radius);
半径近傍の点群データを取得します。
ptCloudB = select(ptCloud,indices);
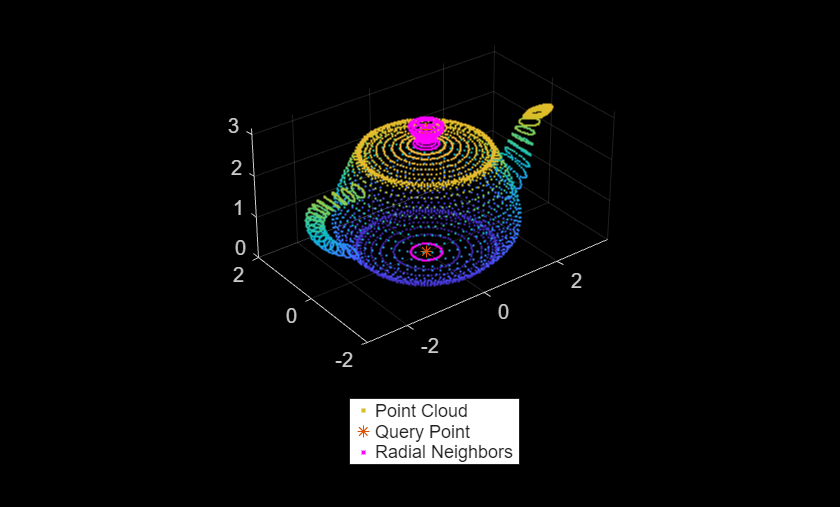
点群を表示します。クエリ点と対応する半径近傍をプロットします。
figure pcshow(ptCloud) hold on plot3(point(1),point(2),point(3),'*') pcshow(ptCloudB.Location,'r') legend('Point Cloud','Query Point','Radial Neighbors','Location','southoutside','Color',[1 1 1]) hold off
オーガナイズド点群内の半径近傍の検索
カメラ射影行列を使用して、オーガナイズド点群データ内のクエリ点の半径近傍を検出します。サンプリングされた点群データの点と対応するイメージ ポイント座標からカメラ射影行列を計算します。
オーガナイズド点群データをワークスペース内に読み込みます。Kinect 深度センサーを使用して点群が生成されます。
ld = load('object3d.mat');
ptCloud = ld.ptCloud;点群データをサンプリングするためのステップ サイズを指定します。
stepSize = 100;
入力点群をサンプリングして、サンプリングされた 3 次元ポイント座標を点群オブジェクトとして格納します。
indices = 1:stepSize:ptCloud.Count; tempPtCloud = select(ptCloud,indices);
サンプリングされた点群から無効な点を削除します。
[tempPtCloud,validIndices] = removeInvalidPoints(tempPtCloud);
入力点群の 3 次元ワールド ポイントの座標を定義します。
worldPoints = tempPtCloud.Location;
入力点群の 3 次元の点の座標に対応する 2 次元イメージ座標を検出します。
[Y,X] = ind2sub([size(ptCloud.Location,1),size(ptCloud.Location,2)],indices); imagePoints = [X(validIndices)' Y(validIndices)'];
このイメージ ポイント座標とワールド ポイント座標からカメラ射影行列を推定します。
camMatrix = estimateCameraMatrix(imagePoints,worldPoints);
近傍を識別するクエリ点と半径を指定します。
point = [0.4 0.3 0.2]; radius = 0.05;
半径近傍のインデックスと距離を取得します。点群の select メソッドを使用して、近傍点の点群データを取得します。
[indices,dists] = findNeighborsInRadius(ptCloud,point,radius,camMatrix); ptCloudB = select(ptCloud,indices);
点群とクエリ点の周囲で見つかった半径近傍を表示します。
figure pcshow(ptCloud); hold on; pcshow(ptCloudB.Location, 'b'); legend('Point Cloud','Radial Neighbors','Location','southoutside','Color',[1 1 1] ) hold off;

入力引数
出力引数
参照
[1] Muja, M. and David G. Lowe. "Fast Approximate Nearest Neighbors with Automatic Algorithm Configuration". In VISAPP International Conference on Computer Vision Theory and Applications. 2009. pp. 331–340.
拡張機能
バージョン履歴
R2015a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)