このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
planeModel
パラメトリック平面モデルを格納するオブジェクト
説明
平面を記述するパラメーターに基づいて、パラメトリック平面モデルを作成して保存します。
プロパティ
オブジェクト関数
plot | パラメトリック モデルのプロット |
normalRotation | Compute transform for rotation of normal to plane |
例
点群からの複数の平面の検出
点群を読み込みます。
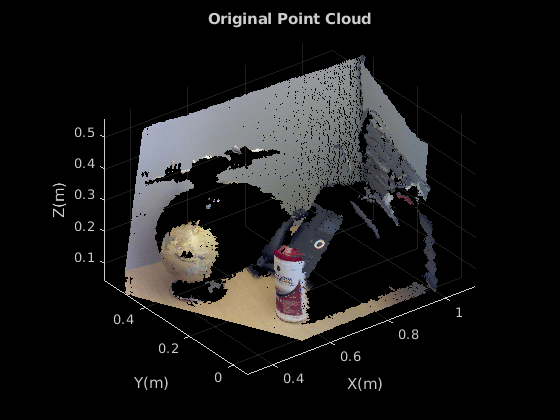
load("object3d.mat")点群を表示し、Figure にラベルを付けます。
figure pcshow(ptCloud) xlabel("X(m)") ylabel("Y(m)") zlabel("Z(m)") title("Original Point Cloud")
平面近似用に点から平面までの最大距離 (2 cm) を設定します。
maxDistance = 0.02;
平面の法線ベクトルを設定します。
referenceVector = [0,0,1];
最大角距離を 5 度に設定します。
maxAngularDistance = 5;
最初の平面であるテーブルを検出して、点群から抽出します。
[model1,inlierIndices,outlierIndices] = pcfitplane(ptCloud,...
maxDistance,referenceVector,maxAngularDistance);
plane1 = select(ptCloud,inlierIndices);
remainPtCloud = select(ptCloud,outlierIndices);関心領域を設定して 2 番目の平面である左の壁の探索範囲を制限します。
roi = [-inf,inf;0.4,inf;-inf,inf]; sampleIndices = findPointsInROI(remainPtCloud,roi);
残りの点群から左の壁を検出して抽出します。
[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...
maxDistance,SampleIndices=sampleIndices);
plane2 = select(remainPtCloud,inlierIndices);
remainPtCloud = select(remainPtCloud,outlierIndices);2 つの平面と残りの点をプロットします。
figure
pcshow(plane1)
title("First Plane")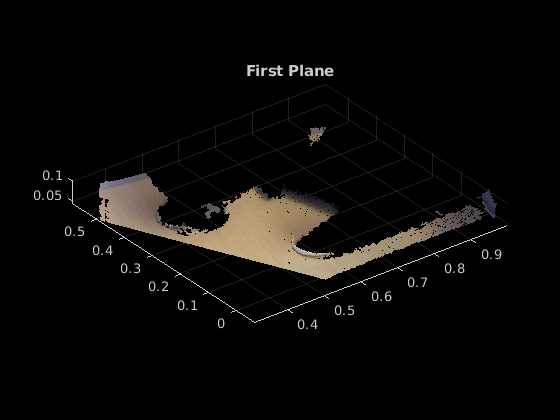
figure
pcshow(plane2)
title("Second Plane")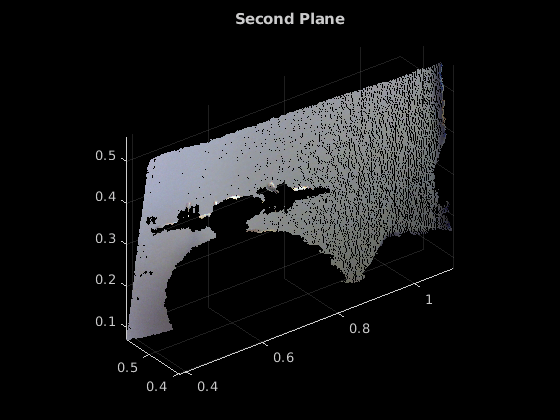
figure
pcshow(remainPtCloud)
title("Remaining Point Cloud")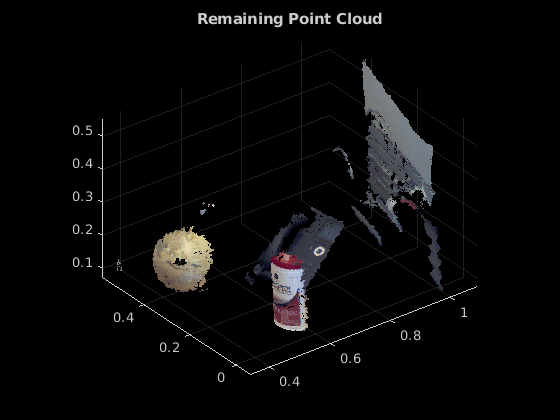
バージョン履歴
R2015b で導入
参考
オブジェクト
関数
pcfitcylinder|pcfitplane|pcfitsphere|pcfitplane|pcfitsphere|pcfitcylinder|pcshow|pcmerge|pctransform|pcdenoise|pcdownsample|pcwrite|pcread|pcregistericp
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)