このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
pctransform
3 次元点群の変換
説明
ptCloudOut = pctransform(ptCloudIn,tform)tform を点群 ptCloudIn に適用します。変換は、剛体変換、相似変換、またはアフィン変換にすることができます。
ptCloudOut = pctransform(ptCloudIn,D)D を点群に適用します。変位場を使用する点群変換は、点群の各点を基準に平行移動を定義します。
例
剛体変換を使用した 3 次元点群の回転
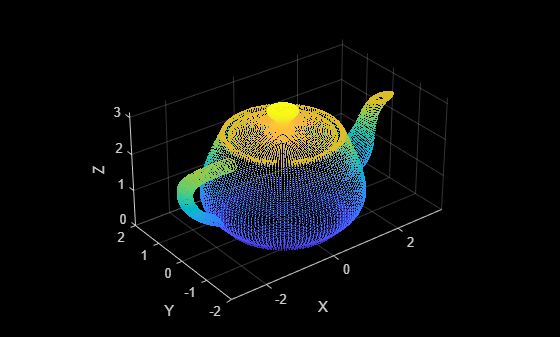
点群を読み取ります。
ptCloud = pcread('teapot.ply');点群をプロットします。
figure pcshow(ptCloud) xlabel('X') ylabel('Y') zlabel('Z')
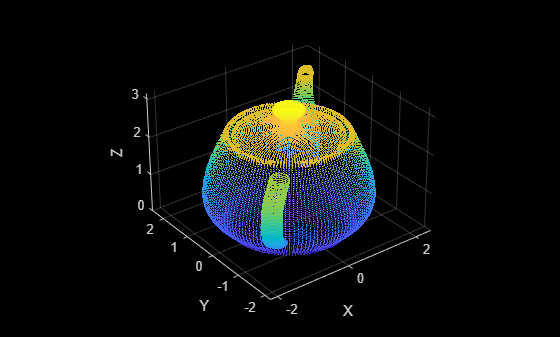
z 軸に沿って 45 度の回転を行う変換オブジェクトを作成します。
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
点群を変換します。
ptCloudOut = pctransform(ptCloud,tform);
変換後の点群をプロットします。
figure pcshow(ptCloudOut) xlabel('X') ylabel('Y') zlabel('Z')
3 次元点群の剛体変換と非剛体変換
この例では、剛体変換 (回転) と非剛体変換 (せん断) を 3 次元点群に適用します。
点群をワークスペースに読み取ります。
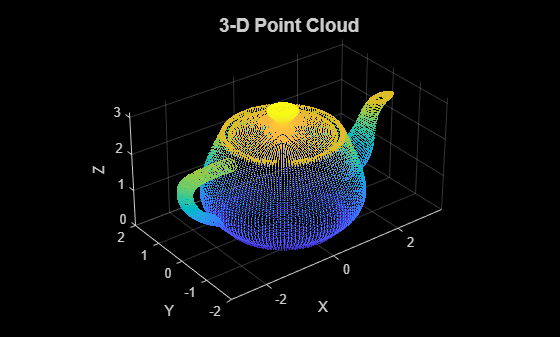
ptCloud = pcread('teapot.ply');元の 3 次元点群をプロットします。
figure1 = figure; axes1 = axes(Parent=figure1); pcshow(ptCloud,Parent=axes1,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title('3-D Point Cloud',FontSize=14)
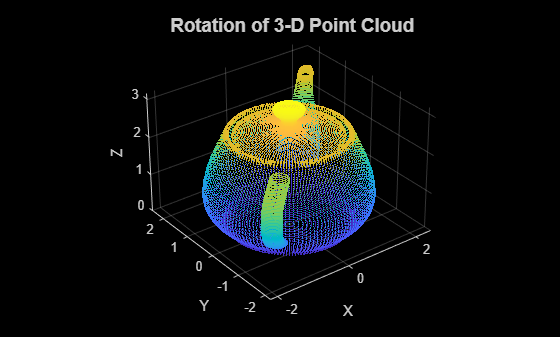
3 次元点群の回転
z 軸に沿って 45 度の回転を定義する剛体変換オブジェクトを作成します。
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
点群を変換します。
ptCloudOut1 = pctransform(ptCloud,tform);
回転させた点群をプロットします。
figure2 = figure; axes2 = axes(Parent=figure2); pcshow(ptCloudOut1,Parent=axes2,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Rotation of 3-D Point Cloud'},FontSize=14)
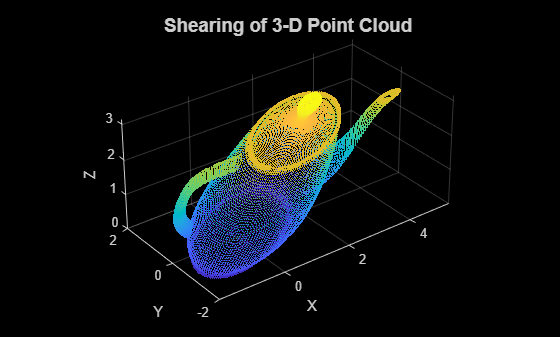
3 次元点群のせん断
x 軸に沿ってせん断を定義するアフィン変換オブジェクトを作成します。
A = [1 0.75 0.75 0; ... 0 1 0 0; ... 0 0 1 0; ... 0 0 0 1]; tform = affinetform3d(A);
点群を変換します。
ptCloudOut2 = pctransform(ptCloud,tform);
変換後の点群をプロットします。
figure3 = figure; axes3 = axes(Parent=figure3); pcshow(ptCloudOut2,Parent=axes3,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Shearing of 3-D Point Cloud'},FontSize=14)
変位場を使用した点群変換
点群をワークスペースに読み取ります。
ptCloud = pcread('teapot.ply');点群と同じサイズの変位場 D を作成します。
D = zeros(size(ptCloud.Location));
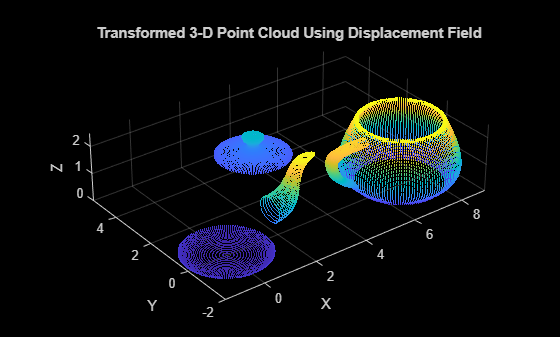
最初の半分の点の x 軸に沿った変位場の値を 7 に設定します。
pthalf = ptCloud.Count/2; D(1:pthalf,1) = 7;
pointCloud メソッドfindNeighborsInRadiusを使用して、関心領域 (ROI) 内の点のインデックスを抽出します。ROI 内の点の x 軸、y 軸、および z 軸に沿った変位場の値をそれぞれ、4、4、-2 に設定します。
indices = findNeighborsInRadius(ptCloud,[0 0 3.1],1.5); D(indices,1:2) = 4; D(indices,3) = -2;
変位場を使用して点群を変換します。
ptCloudOut = pctransform(ptCloud,D);
元の点群と変換後の点群を表示します。
figure pcshow(ptCloud) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Original 3-D Point Cloud')
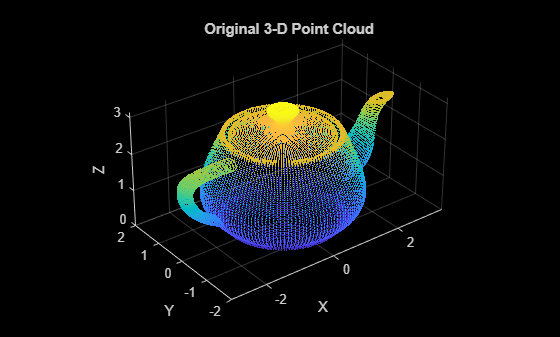
figure pcshow(ptCloudOut) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Transformed 3-D Point Cloud Using Displacement Field')
入力引数
出力引数
拡張機能
バージョン履歴
R2015a で導入参考
オブジェクト
関数
pcplayer|pcshow|pcwrite|pcread|pcmerge|pcdownsample|pcfitplane|pcdenoise|pcregistericp|pccat|pcalign
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)