このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ライブ ビデオ取得を使用したエッジ検出
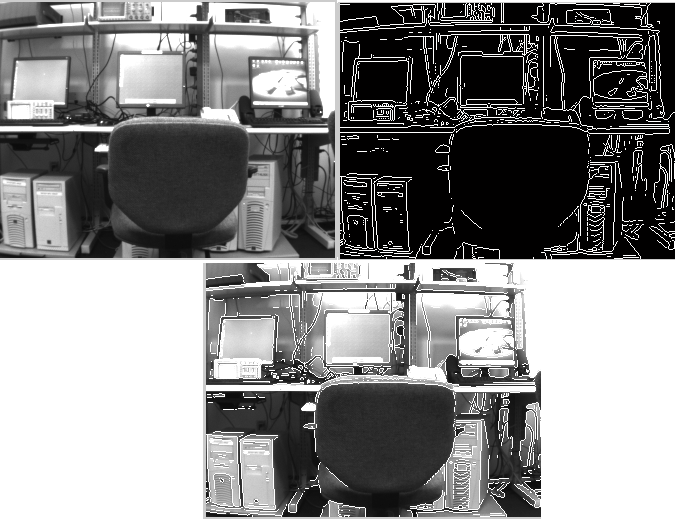
この例では、Image Acquisition Toolbox™ で提供される From Video Device ブロックを使用して、Hamamatsu C8484 カメラから Simulink® にライブのイメージ データを取得する方法を説明します。入力ビデオ ストリーム内のオブジェクトのエッジを検出するには、プレウィット法を適用します。
Image Acquisition Toolbox には、PC 対応のイメージング ハードウェアから直接 MATLAB® および Simulink にイメージとビデオを取得する関数が備わっています。ハードウェアの自動検出、ハードウェア プロパティの構成、取得データのプレビュー、イメージとビデオの取得などを行えます。
この例のモデルを実行するには、Image Acquisition Toolbox および Hamamatsu イメージ取得デバイス (C8484) が必要です。
「ライブ ビデオ取得を使用したエッジ検出」をご覧ください (4 秒)。
モデル例
次の図は From Video Device ブロックを使用したモデル例を示しています。




ライブ ビデオの入力
この例では、Hamamatsu イメージ取得デバイス (C8484) からライブで入力ビデオを取得します。ブロックがカメラから強度データを取得して、シミュレーションの各タイム ステップで Simulink モデルに出力します。
エッジ検出の解析
この例では、Computer Vision Toolbox™ を使用してビデオ入力内にあるオブジェクトのエッジを検出します。モデルを実行するときに Edge Detection ブロックをダブルクリックすると、シミュレーションの実行中にしきい値パラメーターを調整できます。しきい値の設定が高いほど、ビデオ ストリームで検出されるエッジの数は少なくなります。
この例では Hamamatsu カメラを使用しましたが、サポートされている他のイメージ取得デバイスを使用するようモデルを更新することができます。これにより、異なるイメージ取得ハードウェアでも同じ Simulink モデルを使用できるようになります。
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)