このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Simulink モデルの変更と操作点の仕様の同期
Simulink® モデルを変更すると、状態、入力、または出力が変更、追加、または削除される可能性があり、それによって操作点が変更されます。既存の操作点の仕様オブジェクトを同期して、モデル内の変更を反映させることができます。
定常状態マネージャーを使用したモデルの変更の同期
定常状態マネージャーが開いている間に Simulink モデルを変更する場合、定常状態マネージャーで操作点の仕様を同期して、モデルの変更を反映させなければなりません。
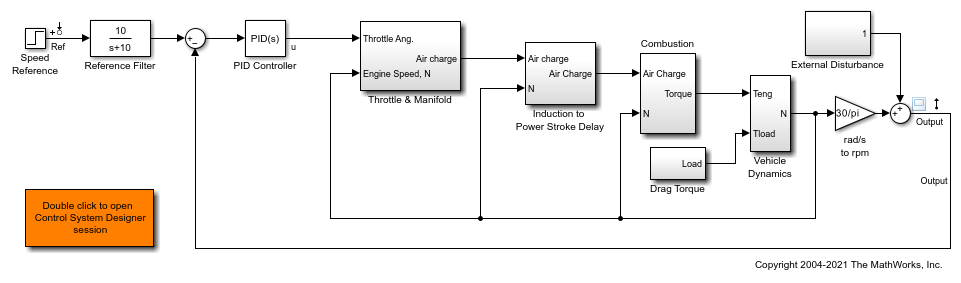
Simulink モデルを開きます。
sys = ('scdspeedctrl');
open_system(sys)定常状態マネージャーを開くには、Simulink モデル ウィンドウの [アプリ] ギャラリーで [定常状態マネージャー] をクリックします。
現在のモデル コンフィギュレーションに基づいて操作の仕様を作成するには、定常状態マネージャーの [定常状態] タブで [仕様の平衡化] をクリックします。
[spec1] ドキュメントでは Reference Filter ブロックが 1 つの状態をもちます。

Simulink モデル ウィンドウで Reference Filter ブロックをダブルクリックします。伝達関数の [分子係数] を 100 に変更し、[分母係数] を [1 20 100] に変更します。
[OK] をクリックします。
この変更によりフィルターの次数が大きくなり、Simulink モデルに状態が追加されます。
操作点の仕様を更新してモデルの変更を反映させるには、定常状態マネージャーの [仕様] タブで [モデルから同期] をクリックします。

仕様が更新されます。ここで Reference Filter ブロックは 2 つの状態をもちます。

これらの仕様を満たす操作点を見つけるには、[仕様] タブで [平衡化]  をクリックします。
をクリックします。
モデル線形化器を使用したモデルの変更の同期
モデル線形化器が開いている間に Simulink モデルを変更する場合、モデル線形化器で操作点の仕様を同期して、モデルの変更を反映させなければなりません。
Simulink モデルを開きます。
sys = ('scdspeedctrl');
open_system(sys)モデル線形化器を開くには、Simulink モデル ウィンドウの [アプリ] ギャラリーで、[モデル線形化器] をクリックします。
モデル線形化器の [操作点] ドロップダウン リストで、[モデルの平衡化] を選択します。

[モデルの平衡化] ダイアログ ボックスで、Reference Filter ブロックは状態を 1 つ含みます。
Simulink モデル ウィンドウで Reference Filter ブロックをダブルクリックします。伝達関数の [分子係数] を 100 に変更し、[分母係数] を [1 20 100] に変更します。
[OK] をクリックします。
この変更によりフィルターの次数が大きくなり、Simulink モデルに状態が追加されます。
操作点の仕様を更新してモデルの変更を反映させるには、[モデルの平衡化] ダイアログ ボックスで、[モデルと同期] をクリックします。
仕様が更新されます。ここで Reference Filter ブロックは 2 つの状態をもちます。

これらの仕様を満たす操作点を見つけるには、[平衡化の開始] をクリックします。
コマンド ラインを使用したモデルの変更の同期
以下の例では、既存の操作点の仕様オブジェクトを Simulink® モデルの変更で更新する方法を示します。
モデルを開きます。
sys = 'scdspeedctrl';
open_system(sys)
現在のモデル コンフィギュレーションに基づいて操作点の仕様オブジェクトを作成します。
opspec = operspec(sys)
opspec =
Operating point specification for the Model scdspeedctrl.
(Time-Varying Components Evaluated at time t=0)
States:
----------
x Known SteadyState Min Max dxMin dxMax
___________ ___________ ___________ ___________ ___________ ___________ ___________
(1.) scdspeedctrl/External Disturbance/Transfer Fcn
0 false true -Inf Inf -Inf Inf
0 false true -Inf Inf -Inf Inf
(2.) scdspeedctrl/PID Controller/Filter/Cont. Filter/Filter
0 false true -Inf Inf -Inf Inf
(3.) scdspeedctrl/PID Controller/Integrator/Continuous/Integrator
8.9768 false true -Inf Inf -Inf Inf
(4.) scdspeedctrl/Reference Filter/State Space
200 false true -Inf Inf -Inf Inf
(5.) scdspeedctrl/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
0.54363 false true -Inf Inf -Inf Inf
(6.) scdspeedctrl/Vehicle Dynamics/w = T//J w0 = 209 rad//s
209.4395 false true -Inf Inf -Inf Inf
Inputs: None
----------
Outputs: None
----------
Reference Filter ブロックの伝達関数を変更します。分子パラメーターを 100、分母パラメーターを [1 20 100] に設定します。
set_param('scdspeedctrl/Reference Filter','N',"100"); set_param('scdspeedctrl/Reference Filter','D',"[1 20 100]");
モデル パラメーターが変更されたため、次のコマンドを使用して opspec の仕様を満たす操作点を検出しようとすると、エラーが発生します。
op = findop(sys,opspec);
操作点の仕様オブジェクトを更新して、モデルの変更を反映させます。
opspec = update(opspec);
更新された仕様を満たす操作点を見つけます。
op = findop(sys,opspec);
Operating point search report:
---------------------------------
opreport =
Operating point search report for the Model scdspeedctrl.
(Time-Varying Components Evaluated at time t=0)
Operating point specifications were successfully met.
States:
----------
Min x Max dxMin dx dxMax
___________ ___________ ___________ ___________ ___________ ___________
(1.) scdspeedctrl/External Disturbance/Transfer Fcn
-Inf 0 Inf 0 0 0
-Inf 0 Inf 0 0 0
(2.) scdspeedctrl/PID Controller/Filter/Cont. Filter/Filter
-Inf 0 Inf 0 0 0
(3.) scdspeedctrl/PID Controller/Integrator/Continuous/Integrator
-Inf 8.9768 Inf 0 -4.5077e-14 0
(4.) scdspeedctrl/Throttle & Manifold/Intake Manifold/p0 = 0.543 bar
-Inf 0.54363 Inf 0 2.9365e-15 0
(5.) scdspeedctrl/Vehicle Dynamics/w = T//J w0 = 209 rad//s
-Inf 209.4395 Inf 0 -1.5226e-13 0
(6.) scdspeedctrl/Reference Filter/State Space
-Inf 0 Inf 0 0 0
-Inf 20 Inf 0 0 0
Inputs: None
----------
Outputs: None
----------
操作点の仕様オブジェクトを更新した後は、最適化アルゴリズムによって操作点が正しく検出されます。
参考
関連するトピック
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)