Pole-Zero Plot
非線形 Simulink モデルから近似した線形システムの極-零点プロット
ライブラリ
Simulink® Control Design™

説明
このブロックは、[範囲] タブの既定のパラメーター設定が異なる点を除き、Check Pole-Zero Characteristics ブロックと同じです。
Simulink モデルから線形化システムを計算し、極-零点配置図に極および零点をプロットします。
シミュレーション時に、指定された線形化入力と出力との間でモデルの一部を線形化し、線形システムの極と零点をプロットします。
Simulink モデルは連続時間、離散時間またはマルチレートの可能性があり、むだ時間が含まれることもあります。このブロックには線形化入力/出力ペアを 1 つしか指定できないため、この線形化システムは単入力単出力 (SISO) です。
極の位置で 2 次特性を近似する複数の範囲を指定して、プロットに表示することができます。また、シミュレーション時にその範囲が満たされることを確認できます。
すべての範囲が満たされる場合、ブロックは処理を行いません。
範囲が満たされない場合、ブロックがアサートし、警告メッセージが MATLAB® コマンド ウィンドウに表示されます。ブロックの以下の動作も指定できます。
MATLAB 式の評価
シミュレーションの停止と、そのブロックのフォーカスへの移動
シミュレーション時に、ブロックから次の論理アサーション信号を出力することもできます。
すべての範囲が満たされる場合、信号は true (
1) です。いずれかの範囲が満たされない場合、信号は false (
0) です。
複数の Pole-Zero Plot ブロックを追加して、モデルのさまざまな部分の極と零点を計算しプロットできます。
線形システムを MATLAB ワークスペースに変数として保存できます。
ブロックではコード生成はサポートされず、[ノーマル] シミュレーション モードでのみ使用できます。
パラメーター
次の表は、ブロック パラメーター ダイアログ ボックスからアクセスできる Pole-Zero Plot のブロック パラメーターをまとめています。
| タスク | パラメーター | |
|---|---|---|
| 線形化を設定します。 | 入出力 (I/O) を指定します。 | [線形化] タブでの操作: |
| 設定を指定します。 | [線形化] タブでの操作: | |
| アルゴリズムを指定します。 | [線形化] タブの [アルゴリズム オプション] での操作: | |
| 線形システム I/O および状態名のラベルを指定します。 | [線形化] タブの [ラベル] での操作: | |
| 線形システムをプロットします。 | [プロットの表示] | |
| (オプション) 極-零点の範囲を指定して、アサーションを行います。 | [範囲] タブでの操作: | |
| アサーションのオプションを指定します (線形システムに範囲を指定する場合のみ)。 | [アサーション] タブでの操作: | |
| 線形システムを MATLAB ワークスペースに保存します。 | [ログ] タブのデータをワークスペースに保存。 | |
| ブロックをダブルクリックして、ブロック パラメーター ダイアログ ボックスではなくプロット ウィンドウを表示します。 | ブロックが開いたときにプロットを表示. | |
線形化の入力/出力
非線形 Simulink モデルのうち、線形化の対象部分を定義する線形化入出力です。
Simulink モデルで線形化の入力と出力を定義している場合、ブロックはそれらのポイントを自動的に検出し、[線形化の入力/出力] 領域に表示します。任意の時点で  をクリックすると、モデルからの I/O で [線形化の入力/出力] テーブルを更新できます。その他の解析ポイントを追加するには、以下の処理を実行します。
をクリックすると、モデルからの I/O で [線形化の入力/出力] テーブルを更新できます。その他の解析ポイントを追加するには、以下の処理を実行します。
 をクリックします。
をクリックします。 ダイアログ ボックスが拡張され、[モデル内の信号をクリックして、選択します] 領域と新しい
 ボタンが表示されます。
ボタンが表示されます。Simulink エディターで 1 つ以上の信号を選択します。
選択した信号は、[モデル内の信号をクリックして、選択します] 領域の [モデル信号] の下に表示されます。
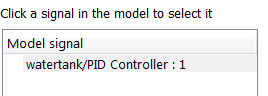
(オプションで) バスの場合、個別の要素を選択するためにバス信号が展開されます。
ヒント
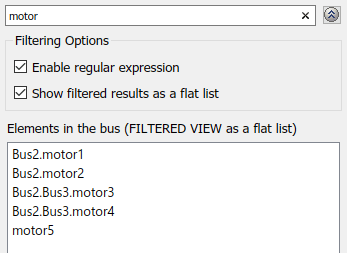
大きなバスやその他の信号の大きなリストの場合は、[名前でフィルター] エディット ボックスに検索テキストを入力し、要素名をフィルター処理できます。名前の一致を判断する比較では大文字小文字を区別します。さらに、MATLAB 正規表現も入力できます。
フィルター処理オプションを変更するには、
 をクリックします。フィルター処理のオプションを非表示にするには、
をクリックします。フィルター処理のオプションを非表示にするには、 をクリックします。
をクリックします。- をクリックして [線形化の入力/出力] テーブルに選択した信号を追加します。

[線形化の入力/出力] テーブルから信号を削除するには、信号を選択して
 をクリックします。
をクリックします。ヒント
[線形化の入力/出力] テーブルの信号に対応する Simulink モデル内の場所を検出するには、テーブル内の信号を選択して
 をクリックします。
をクリックします。
テーブルには、選択した信号に関する次のような情報が表示されます。
| ブロック : 端子 :バス要素 | 入出力に関連付けられているブロック名。ブロック名の横の数字は選択したバス信号をもつ端子番号です。最後のエントリは、選択されたバス要素名です。 |
| 構成 | 線形化ポイントのタイプ。
|
メモ
入力または出力を指定しないでモデルのシミュレーションを行った場合は、線形システムは計算されず、MATLAB プロンプトに警告メッセージが表示されます。
既定の設定なし
モデル内の信号をクリックして、選択します
Simulink モデルで信号の選択を有効にします。 をクリックしたときのみ表示されます。
このオプションが表示されると、表示が以下のように変わります。
新しい
ボタン。[線形化の入力/出力] テーブルで線形化入力または出力として選択した信号を追加するときに使用します。詳細については、線形化の入力/出力を参照してください。
- が
 に変わります。 を使用して、[モデル内の信号をクリックして、選択します] 領域を折りたたみます。
に変わります。 を使用して、[モデル内の信号をクリックして、選択します] 領域を折りたたみます。
既定の設定なし
正規表現を有効にする
信号名をフィルター処理するための MATLAB 正規表現の使用を有効にします。たとえば、[名前でフィルター] エディット ボックスに「t$」と入力すると、信号名が小文字の t で終了するすべての信号 (およびその直接の親) が表示されます。詳細については、正規表現を参照してください。
既定: オン
 オン
オン 信号名をフィルター処理するための MATLAB 正規表現の使用を許可します。
 オフ
オフ信号名をフィルター処理するための MATLAB 正規表現の使用を無効にします。フィルター処理は、[名前でフィルター] エディット ボックスで入力されたテキストをリテラル文字ベクトルとして扱います。
[名前でフィルター] エディット ボックスの右側にある [オプション] ボタン ( ) を選択すると、このパラメーターが有効になります。
) を選択すると、このパラメーターが有効になります。
フィルター処理された結果をフラット リストとして表示する
[名前でフィルター] エディット ボックスの検索テキストに基づいて、フィルター処理された信号のリストを表示するのにフラット リスト形式を使用します。フラット リスト形式では、バス信号の階層を反映するドット表記を使用します。次に示すのは、フィルター処理された一連の入れ子のバス記号に対するフラット リスト形式の例です。
既定: オフ
- オン
フラット リスト形式を使用してフィルター処理された信号リストを表示します。このとき、ツリー形式を使用せずにドット表記でバス階層を示します。
- オフ
ツリー形式を使用して、フィルター処理されたバス階層を表示します。
[名前でフィルター] エディット ボックスの右側にある [オプション] ボタン () を選択すると、このパラメーターが有効になります。
線形化の対象
シミュレーション時に線形システムを計算するタイミング。
既定: シミュレーションのスナップショット
シミュレーションのスナップショット[スナップショット時間] で指定された特定のシミュレーション時間。
以下のような場合に使用します。
モデルが定常状態の操作点にある時間が 1 つ以上わかる場合
特定の時間に線形システムを計算する場合
外部トリガートリガーベースのシミュレーション イベント。[トリガー タイプ] でトリガー タイプを指定します。
シミュレーション時に生成された信号が定常状態の操作点を示すときに使用します。
このオプションを選択するとブロックにトリガー端子が追加されます。この端子を使用してトリガー信号にブロックを接続します。
たとえば、航空機のモデルでは、燃料質量がその最大質量の何分の 1 かになったときに、線形システムを計算することがあります。この場合、この条件を外部トリガーとしてモデル化します。
このパラメーターを
[シミュレーションのスナップショット]に設定すると、[スナップショット時間] が有効になります。このパラメーターを
[外部トリガー]に設定すると、[トリガー タイプ] が有効になります。
パラメーター: LinearizeAt |
| 型: 文字ベクトル |
値: 'SnapshotTimes' | 'ExternalTrigger' |
既定: 'SnapshotTimes' |
スナップショット時間
1 回以上のシミュレーション回数。そのときに線形システムが計算されます。
既定: 0
個別のシミュレーション時間には、時間を入力します。以下のような場合に使用します。
特定の時間に線形システムをプロットする場合
モデルが定常状態の操作点に達するおおよその時間がわかっている場合
複数のシミュレーション時間にはベクトルを入力します。複数の時間で線形システムを計算しプロットするときに使用します。
[スナップショット時間] は Simulink モデルに指定されたシミュレーション時間以下でなければなりません。
[線形化の対象] で [シミュレーションのスナップショット] を選択すると、このパラメーターが有効になります。
パラメーター: SnapshotTimes |
| 型: 文字ベクトル |
値: 0 | 正の実数 | 正の実数のベクトル |
既定: 0 |
トリガー タイプ
線形システムを計算する外部トリガーのトリガー タイプ。
既定: 立ち上がりエッジ
立ち上がりエッジ外部トリガー信号の立ち上がりエッジ。
立ち下がりエッジ外部トリガー信号の立ち下がりエッジ。
[線形化の対象] で [外部トリガー] を選択すると、このパラメーターが有効になります。
パラメーター: TriggerType |
| 型: 文字ベクトル |
値: 'rising' | 'falling' |
既定: 'rising' |
ゼロクロッシング検出を有効にする
[ゼロクロッシング検出を有効にする] は、以下のシミュレーション時間の線形システム特性の計算を行います。
[スナップショット時間] で指定された正確なスナップショット時間。
次の図に示すように、ゼロクロッシング検出が有効な場合、可変ステップ Simulink ソルバーはスナップショット時間
Tsnapでモデルをシミュレートします。Tsnapは、ソルバーが自動的に選択するシミュレーション時間のステップTn-1とTnとの間に位置する場合があります。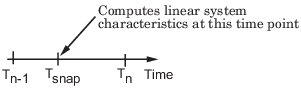
[トリガー タイプ] で指定された、外部トリガーが検出される正確な時間。
次の図に示すように、ゼロクロッシング検出が有効な場合、可変ステップ Simulink ソルバーはトリガー信号が検出される時間
Ttrigでモデルをシミュレートします。Ttrigは、ソルバーが自動的に選択するシミュレーション時間のステップTn-1とTnとの間に位置する場合があります。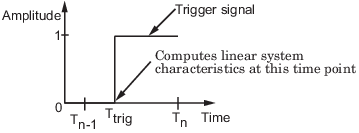
ゼロクロッシング検出の詳細については、「Simulink ユーザー ガイド」のゼロクロッシング検出を参照してください。
既定: オン
- オン
正確なスナップショット時間またはトリガー信号が検出される正確な時間での線形システムの特性を計算します。
この設定は、Simulink ソルバーが固定ステップの場合は無視されます。
- オフ
可変ステップ ソルバーによって選択されるシミュレーション タイム ステップでの線形システム特性を計算します。線形システムは、正確なスナップショット時間またはトリガー信号が検出される正確な時間で計算されない場合があります。
パラメーター: ZeroCross |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'on' |
正確な遅延を使用
線形モデルでのむだ時間の表現方法。
モデル内にむだ時間のあるブロックがある場合は、このオプションを使用します。
既定: オフ
- オン
正確な遅延表現をもつ線形モデルを返します。
- オフ
Transport Delay ブロックおよび Variable Transport Delay ブロックに指定されたとおり、遅延のパデ近似をもつ線形モデルを返します。
パラメーター: UseExactDelayModel |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
線形システムのサンプル時間
シミュレーション時に計算された線形システムのサンプル時間。
このパラメーターを使って以下が可能です。
連続時間システムの特定のサンプル時間をもつ離散時間システムを計算します。
異なるサンプル時間で離散時間システムをリサンプリングします。
離散時間システムから連続時間システムを計算します。
連続時間システムから離散時間システムを計算したり、その逆の計算をしたりするときは、[サンプル時間レート変換メソッド] に指定された変換メソッドが使用されます。
既定: auto
auto.以下のようにサンプル時間を計算します。連続時間モデルの場合は 0。
異なるサンプル時間をもつブロックがあるモデル (マルチレート モデル) の場合は、サンプル時間の最小公倍数。たとえば、連続時間およびサンプル時間が 0、0.2、0.3 の離散時間ブロックの組み合わせがある場合、線形モデルのサンプル時間は 0.6 です。
- 正の有限値。以下の計算に使用します。
連続時間システムからの離散時間線形システムの計算。
別のサンプル時間をもつ別の離散時間システムからの離散時間線形システムの計算。
0離散時間システムから連続時間線形システムを計算するのに使用します。
パラメーター: SampleTime |
| 型: 文字ベクトル |
値: 'auto' | 正の有限値 | '0' |
既定: 'auto' |
サンプル時間レート変換メソッド
シングルレートまたはマルチレート モデルのサンプル時間を変換するメソッド。
このパラメーターは、[線形システムのサンプル時間] の値が auto でないときにのみ使用します。
既定: ゼロ次ホールド
ゼロ次ホールドゼロ次ホールド。ここで、制御入力をサンプル時間
Tsの間中、区分的に一定と仮定します。詳細については、ゼロ次ホールドを参照してください。通常、このメソッドは時間領域でより効果的に実行されます。
Tustin (双 1 次)周波数プリワーピングのない双一次 (Tustin) 近似。非整数のむだ時間をサンプル時間の最も近い整数倍に丸めます。詳細については、Tustin 近似を参照してください。
通常、このメソッドは周波数領域でより効果的に実行されます。
プリワーピング付き双一次 (Tustin) 変換周波数プリワーピング付き双一次 (Tustin) 近似。また、[プリワープ周波数 (rad/s)] のプリワープ周波数を指定します。詳細については、Tustin 近似を参照してください。
通常、このメソッドは周波数領域でより効果的に実行されます。このメソッドを使用して、対象の周波数領域でのマッチングを確認します。
アップサンプリング、不可の場合はゼロ次ホールド可能な場合は離散時間システムをアップサンプリングし、不可の場合は
[ゼロ次ホールド]を使用します。アップサンプリングを行えるのは、離散時間システムを、元のシステムのサンプル時間の整数倍である、新しいより高速なサンプル時間に変換する場合のみです。
アップサンプリング、不可の場合は双一次 (Tustin)可能な場合は離散時間システムをアップサンプリングし、不可の場合は
[Tustin (双 1 次)]を使用します。アップサンプリングを行えるのは、離散時間システムを、元のシステムのサンプル時間の整数倍である、新しいより高速なサンプル時間に変換する場合のみです。
アップサンプリング、不可の場合はプリワーピング付き双一次可能な場合は離散時間システムをアップサンプリングし、不可の場合は
[プリワーピング付き双一次 (Tustin) 変換]を使用します。また、[プリワープ周波数 (rad/s)] のプリワープ周波数を指定します。アップサンプリングを行えるのは、離散時間システムを、元のシステムのサンプル時間の整数倍である、新しいより高速なサンプル時間に変換する場合のみです。
パラメーター: RateConversionMethod |
| 型: 文字ベクトル |
値: 'zoh' | 'tustin' | 'prewarp'| 'upsampling_zoh'| 'upsampling_tustin'| 'upsampling_prewarp' |
既定: 'zoh' |
プリワープ周波数 (rad/s)
Tustin メソッドのプリワープ周波数。ラジアン/秒で指定。
既定: 10
リサンプリング前後のナイキスト周波数より小さい、正のスカラー値。値 0 は、周波数プリワープのない標準の Tustin メソッドに対応します。
次のいずれかを選択します。
プリワーピング付き双一次 (Tustin) 変換アップサンプリング、不可の場合はプリワーピング付き双一次
[サンプル時間レート変換メソッド] で選択を行うと、このパラメーターが有効になります。
パラメーター: PreWarpFreq |
| 型: 文字ベクトル |
値: 10 | 正のスカラー値 |
既定: 10 |
完全なブロック名を使用
シミュレーション時に計算された線形システムに状態名、入力名、および出力名を表示する方法。
線形システムは状態空間オブジェクトであり、システム状態名、入力名、および出力名は、状態空間オブジェクトの次のプロパティに表示されます。
| 入力名、出力名または状態名 | 表示される状態空間オブジェクトのプロパティ |
|---|---|
| 線形化入力名 | InputName |
| 線形化出力名 | OutputName |
| 状態名 | StateName |
既定: オフ
- オン
状態名、入力名、出力名を、モデルの階層構造でのパスと共に示します。たとえば、化学反応器の線形システム特性のプロットの例で使用されている
scdcstrモデルでは、CSTRサブシステムのIntegrator1ブロックの状態はscdcstr/CSTR/Integrator1という絶対パスで表示されます。- オフ
状態名、入力名および出力名のみを示します。信号名が一意であり、Simulink モデル内での信号の位置がわかっている場合に、このオプションを使用します。たとえば、
CSTRサブシステムのIntegrator1ブロック内の状態はIntegrator1と表示されます。
パラメーター: UseFullBlockNameLabels |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
バス信号名を使用
シミュレーション時に計算された線形システムで、バスの線形化入力および出力に関連付けられている信号にラベルを付ける方法(バス全体を I/O ポイントとして選択した場合にのみ適用されます)。
バス信号全体を選択することは推奨されません。代わりに、個別のバス要素を選択してください。
モデルが mux/バス混在の場合は、このパラメーターを使用できません。
既定: オフ
- オン
個々のバス要素の信号名を使用します。
バス信号名は、入力および出力が以下のブロックの出力にある場合に表示されます。
バス オブジェクトを含んでいる、ルートレベルの Inport ブロック
Bus Creator ブロック
そのソースが以下のブロックのいずれかへ逆に追跡するサブシステム ブロック
Bus Creator ブロックの出力
バーチャル、または非バーチャル サブシステムの境界のみのパス スルーによる、ルートレベルの Inport ブロック
- オフ
バス信号チャネル番号を使用します。
パラメーター: UseBusSignalLabels |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
アサーションに整定時間の範囲を含める
極の位置が、[整定時間 (秒) <=] に指定した整定時間で 2 次近似範囲を満たすことを確認します。極が整定時間の範囲により指定された領域の外にある場合は、警告が表示されます。
このパラメーターは、[アサーション] タブの [アサーションを有効にする] が選択されている場合のみ、アサーションに使用されます。
線形システムには整定時間の範囲を複数指定できます。範囲は極-零点プロットにも表示されます。[アサーションを有効にする] をオフにすると、範囲はアサーションに使用されませんが、プロットにはそのまま表示されます。
既定:
Pole-Zero Plot ブロックではオフ。
Check Pole-Zero Characteristics ブロックではオン。
- オン
シミュレーション時に、各極が整定時間範囲で定義された領域にあることを確認します。
- オフ
シミュレーション時に、各極が整定時間範囲で定義された領域にあることを確認しません。
このパラメーターの選択を解除すると、整定時間の範囲が無効になり、シミュレーション時に範囲が満たされていることの確認が停止されます。範囲はプロット上で灰色で表示されます。

オーバーシュートの割合、減衰比、または固有振動数など、他の範囲も指定し、整定時間の範囲をアサーションから除外する場合は、このパラメーターをオフにします。
プロット上で範囲のみを表示する場合は、[アサーションを有効にする] をオフにします。
パラメーター: EnableSettlingTime |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: Pole-Zero Plot ブロックでは 'off'、Check Pole-Zero Characteristics ブロックでは 'on'。 |
整定時間 (秒) <=
秒単位で示される、2 次システムの整定時間。
既定:
Pole-Zero Plot ブロックでは [] |
Check Pole-Zero Characteristics ブロックでは 1 |
範囲が 1 つの場合は、正の有限の実数スカラー。
範囲が複数ある場合は、正の有限の実数スカラーの cell 配列。
整定時間の範囲が満たされていることをアサートするには、[アサーションに整定時間の範囲を含める] および [アサーションを有効にする] の両方を選択します。
プロット ウィンドウから整定時間の範囲を追加したり変更したりできます。
新しい整定時間の範囲を追加するには、プロットを右クリックし、[範囲] 、 [新規範囲] を選択します。[整定時間] に新しい値を指定します。
整定時間の範囲を変更するには、対応する範囲セグメントをドラッグします。または、範囲を右クリックし、[範囲] 、 [編集] を選択します。[整定時間 (秒)<] に新しい値を指定します。
モデルをシミュレートする前に、[ブロックの更新] をクリックしなければなりません。
パラメーター: SettlingTime |
| 型: 文字ベクトル |
値: [] | 1| finite positive real scalar | cell array of finite positive real scalars。一重引用符 ('') で囲まなければなりません。 |
既定: Pole-Zero Plot ブロックでは '[]'、Check Pole-Zero Characteristics ブロックでは '1'。 |
アサーションにオーバーシュートの割合範囲を含める
極の位置が、[オーバーシュートの割合 <=] に指定したオーバーシュートの割合で 2 次近似範囲を満たすことを確認します。極がオーバーシュートの割合の範囲で指定された領域の外にある場合は、警告が表示されます。
このパラメーターは、[アサーション] タブの [アサーションを有効にする] が選択されている場合のみ、アサーションに使用されます。
線形システムにはオーバーシュートの割合を複数指定できます。範囲は極-零点プロットにも表示されます。[アサーションを有効にする] をオフにすると、範囲はアサーションに使用されませんが、プロットにはそのまま表示されます。
既定:
| Pole-Zero Plot ブロックではオフ。 |
| Check Pole-Zero Characteristics ブロックではオン。 |
- オン
シミュレーション時に、各極がオーバーシュートの割合の範囲で定義された領域にあることを確認します。
- オフ
シミュレーション時に、各極がオーバーシュートの割合の範囲で定義された領域にあることを確認しません。
パラメーター: EnablePercentOvershoot |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: Pole-Zero Plot ブロックでは 'off'、Check Pole-Zero Characteristics ブロックでは 'on'。 |
オーバーシュートの割合 <=
2 次システムのオーバーシュートの割合。
既定:
Pole-Zero Plot ブロックでは [] |
Check Pole-Zero Characteristics ブロックでは 10 |
最小値: 0
最大値: 100
オーバーシュートの割合の範囲が 1 つの場合、実数のスカラー。
オーバーシュートの割合の範囲が複数ある場合、実数スカラーの cell 配列。
オーバーシュートの割合 p.o は、減衰比 ζ で次のように表すことができます。
オーバーシュートの割合の範囲が満たされていることをアサートするには、[アサーションにオーバーシュートの割合範囲を含める] および [アサーションを有効にする] の両方を選択します。
プロット ウィンドウからオーバーシュートの割合の範囲を追加したり変更したりできます。
新しいオーバーシュートの割合の範囲を追加するには、プロットを右クリックし、[範囲] 、 [新規範囲] を選択します。[設計要件タイプ] の
[オーバーシュートの割合]を選択し、[オーバーシュートの割合 <] に値を指定します。オーバーシュートの割合の範囲を変更するには、対応する範囲セグメントをドラッグします。または、範囲を右クリックし、[範囲] 、 [編集] を選択します。対応するオーバーシュートの割合の値に対する新しい減衰比を [減衰比 >] に指定します。
モデルをシミュレートする前に、[ブロックの更新] をクリックしなければなりません。
パラメーター: PercentOvershoot |
| 型: 文字ベクトル |
値: [] | 10| real scalar between 0 and 100 | cell array of real scalars between 0 and 100。一重引用符 ('') で囲まなければなりません。 |
既定: Pole-Zero Plot ブロックでは '[]'、Check Pole-Zero Characteristics ブロックでは '10'。 |
アサーションに減衰比の範囲を含める
極の位置が、[減衰比 >=] に指定した減衰比で近似次数範囲を満たすことを確認します。極が減衰比の範囲で指定された領域の外にある場合は、警告が表示されます。
このパラメーターは、[アサーション] タブの [アサーションを有効にする] が選択されている場合のみ、アサーションに使用されます。
線形システムには減衰比の範囲を複数指定できます。範囲は極-零点プロットにも表示されます。[アサーションを有効にする] をオフにすると、範囲はアサーションに使用されませんが、プロットにはそのまま表示されます。
既定: オフ
- オン
シミュレーション時に、各極が減衰比の範囲で定義された領域にあることを確認します。
- オフ
シミュレーション時に、各極が減衰比の範囲で定義された領域にあることを確認しません。
このパラメーターの選択を解除すると、減衰比の範囲が無効になり、シミュレーション時に範囲が満たされていることの確認が停止されます。範囲はプロット上で灰色で表示されます。

整定時間、オーバーシュートの割合、または固有振動数など、他の範囲も指定し、減衰比の範囲をアサーションから除外する場合は、このパラメーターをオフにします。
プロット上で範囲のみを表示する場合は、[アサーションを有効にする] をオフにします。
パラメーター: EnableDampingRatio |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
減衰比 >=
2 次システムの減衰比
既定: []
最小値: 0
最大値: 1
減衰比の範囲が 1 つの場合は、正の有限の実数スカラー。
減衰比の範囲が複数ある場合は、正の有限の実数スカラーの cell 配列。
減衰比ζとオーバーシュートの割合 p.o は、次のような関係にあります。
減衰比の範囲が満たされていることをアサートするには、[アサーションに減衰比の範囲を含める] および [アサーションを有効にする] の両方を選択します。
プロット ウィンドウから減衰比の範囲を追加したり変更したりできます。
新しい減衰比の範囲を追加するには、プロットを右クリックし、[範囲] 、 [新規範囲] を選択します。[設計要件タイプ] の
[減衰比]を選択し、[減衰比 >] に値を指定します。減衰比の範囲を変更するには、対応する範囲セグメントをドラッグするか、または右クリックしてから [範囲] 、 [編集] を選択します。[減衰比 >] に新しい値を指定します。
モデルをシミュレートする前に、[ブロックの更新] をクリックしなければなりません。
パラメーター: DampingRatio |
| 型: 文字ベクトル |
値: [] | finite positive real scalar between 0 and 1 | cell array of finite positive real scalars between 0 and 1。一重引用符 ('') で囲まなければなりません。 |
既定: '[]' |
アサーションに固有振動数の範囲を含める
極の位置が、[固有振動数 (ラジアン/秒)] に指定した固有振動数で 2 次近似範囲を満たすことを確認します。固有振動数の範囲は、指定された 1 つ以上の値より大きいか、より小さいか、または等しくなります。極の位置が固有振動数の範囲で定義された領域を満たさない場合は、警告が表示されます。
このパラメーターは、[アサーション] タブの [アサーションを有効にする] が選択されている場合のみ、アサーションに使用されます。
線形システムには固有振動数の範囲を複数指定できます。範囲は極-零点プロットにも表示されます。[アサーションを有効にする] をオフにすると、範囲はアサーションに使用されませんが、プロットにはそのまま表示されます。
既定: オフ
- オン
シミュレーション時に、各極が固有振動数の範囲で定義された領域にあることを確認します。
- オフ
シミュレーション時に、各極が固有振動数の範囲で定義された領域にあることを確認しません。
このパラメーターの選択を解除すると、固有振動数の範囲が無効になり、シミュレーション時に範囲が満たされていることの確認が停止されます。範囲はプロット上で灰色で表示されます。

整定時間、オーバーシュートの割合、または減衰比など、他の範囲も指定し、固有振動数の範囲をアサーションから除外する場合は、このパラメーターをオフにします。
プロット上で範囲のみを表示する場合は、[アサーションを有効にする] をオフにします。
パラメーター: NaturalFrequencyBound |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
固有振動数 (ラジアン/秒)
次数システムの固有振動数。
既定: []
固有振動数の範囲が 1 つの場合は、正の有限の実数スカラー。
固有振動数の範囲が複数ある場合は、正の有限の実数スカラーの cell 配列。
固有振動数の範囲が満たされていることをアサートするには、[アサーションに固有振動数の範囲を含める] および [アサーションを有効にする] の両方を選択します。
プロット ウィンドウから固有振動数の範囲を追加したり変更したりできます。
新しい固有振動数の範囲を追加するには、プロットを右クリックし、[範囲] 、 [新規範囲] を選択します。[設計要件タイプ] の
[固有振動数]を選択し、[固有振動数] に値を指定します。固有振動数の範囲を変更するには、対応する範囲セグメントをドラッグするか、または右クリックしてから [範囲] 、 [編集] を選択します。[固有振動数] に新しい値を指定します。
モデルをシミュレートする前に、[ブロックの更新] をクリックしなければなりません。
パラメーター: NaturalFrequency |
| 型: 文字ベクトル |
値: [] | positive finite real scalar | cell array of positive finite real scalars。一重引用符 ('') で囲まなければなりません。 |
既定: '[]' |
データをワークスペースに保存
1 つ以上の線形システムを保存し、さらに線形解析または制御設計を行います。
データは以下のフィールドをもつ構造体に保存されます。
time— 線形システムを計算するシミュレーション時間。values— 線形システムを表す状態空間モデル。複数のシミュレーション時間で線形システムが計算される場合、valuesは状態空間モデルの配列となります。operatingPoints—values内の各線形システムに対応する操作点。このフィールドは、[各線形化の操作点を保存] がチェックされている場合にのみ存在します。
保存されたデータ構造体の位置は Simulink モデルの構成に依存します。
Simulink モデルがシミュレーション出力を単一のオブジェクトとして保存するように構成されていない場合、データ構造体は MATLAB ワークスペースの変数です。
Simulink モデルがシミュレーション出力を単一のオブジェクトとして保存するように構成されている場合、データ構造体はシミュレーション データのログを含む
Simulink.SimulationOutputオブジェクトのフィールドです。シミュレーション出力を単一のオブジェクトとして保存するようにモデルを構成するには、Simulink エディターの [モデル化] タブで [モデル設定] をクリックします。次に、[コンフィギュレーション パラメーター] ダイアログ ボックスで [単一のシミュレーション出力] パラメーターを選択します。
Simulink でのデータ ログの詳細については、シミュレーション データの保存および Simulink.SimulationOutput のリファレンス ページを参照してください。
既定: オフ
- オン
計算した線形システムを保存します。
- オフ
計算した線形システムを保存しません。
このパラメーターは [変数名] を有効にします。
パラメーター: SaveToWorkspace |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
変数名
シミュレーション時に計算された 1 つ以上の線形システムを格納する、データ構造体の名前。
保存されたデータ構造体の位置は Simulink モデルの構成に依存します。
Simulink モデルがシミュレーション出力を単一のオブジェクトとして保存するように構成されていない場合、データ構造体は MATLAB ワークスペースの変数です。
Simulink モデルがシミュレーション出力を単一のオブジェクトとして保存するように構成されている場合、データ構造体はシミュレーション データのログを含む
Simulink.SimulationOutputオブジェクトのフィールドです。
名前は、Linear Analysis Plot ブロック、Model Verification ブロック、Scope ブロック、To Workspace ブロックなどのすべてのデータ ログ モデル ブロックで使用される変数名の中で一意でなければなりません。またシミュレーションにより、時間、状態、出力などの変数が返されます。
Simulink でのデータ ログの詳細については、シミュレーション データの保存および Simulink.SimulationOutput のリファレンス ページを参照してください。
既定: sys
文字ベクトル。
[データをワークスペースに保存] によって、このパラメーターが有効になります。
パラメーター: SaveName |
| 型: 文字ベクトル |
値: sys | 任意の文字ベクトル。一重引用符 ('') で囲まなければなりません。 |
既定: 'sys' |
各線形化の操作点の保存
詳細な解析または制御設計を行うために線形システムをワークスペースに保存する際に、各線形化に対応する操作点も保存します。このオプションを使用すると、保存された線形システムを格納するデータ構造体に operatingPoints という名前のフィールドが追加されます。
既定: オフ
- オン
操作点を保存します。
- オフ
操作点を保存しません。
[データをワークスペースに保存] によって、このパラメーターが有効になります。
パラメーター: SaveOperatingPoint |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
アサーションを有効にする
ブロックを有効にし、[範囲] タブで指定されアサーションに含まれている範囲がシミュレーション時に満たされていることを確認します。範囲が満たされない場合、アサーションは失敗します。アサーションの失敗をレポートする警告が MATLAB プロンプトに表示されます。
アサーションに失敗した場合、オプションでブロックを以下のように指定できます。
[アサーションが失敗したときのシミュレーション コールバック (オプション)] に指定された MATLAB 式を実行。
[アサーションが失敗したときにシミュレーションを中止] を選択してシミュレーションを中止し、そのブロックにフォーカス。
Linear Analysis Plots ブロックの場合、既定では範囲が含まれていないため、このパラメーターによる影響はありません。アサーションに Linear Analysis Plots ブロックを使用するには、[範囲] タブに範囲を指定して含めます。
このパラメーターをクリアするとアサーションが無効になります。つまり、ブロックでは指定された範囲が満たされていることを確認しません。また、ブロックのアイコンが更新され、そのアサーションが無効であることを示します。

Simulink モデルの [コンフィギュレーション パラメーター] ダイアログ ボックスでは、[Model Verification ブロックを有効にする] パラメーターを使って、ブロックでのこのオプションの設定とは無関係に、モデル内のすべてのモデル検証ブロックを有効にしたり無効にしたりできます。
既定: オン
- オン
シミュレーション時に [範囲] タブでアサーションに含まれている範囲が満たされていることを確認します。範囲に違反があった場合、アサーションの失敗をレポートする警告が MATLAB プロンプトに表示されます。
- オフ
シミュレーション時にアサーションに含まれている範囲が満たされていることを確認しません。
このパラメーターは以下を有効にします。
アサーションが失敗したときのシミュレーション コールバック (オプション)
アサーションが失敗したときにシミュレーションを中止
パラメーター: enabled |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'on' |
アサーションが失敗したときのシミュレーション コールバック (オプション)
アサーションが失敗した場合に実行する MATLAB 式。
式は MATLAB ワークスペースで評価されるため、そのワークスペース内の式に使用されるすべての変数を定義します。
既定の設定なし
MATLAB 式。
[アサーションを有効にする] によって、このパラメーターが有効になります。
パラメーター: callback |
| 型: 文字ベクトル |
値: '' | MATLAB 式 |
既定: '' |
アサーションが失敗したときにシミュレーションを中止
シミュレーション時に [範囲] タブに指定された範囲に違反があった場合に、シミュレーションを中止し、アサーションは失敗します。
Simulink エディターからシミュレーションを実行すると、[シミュレーション診断] ウィンドウが開き、エラー メッセージが表示されます。また、範囲違反が発生した範囲はモデル内で強調表示されます。
既定: オフ
- オン
[範囲] タブに指定された範囲に違反があった場合、シミュレーションを中止します。
- オフ
範囲に違反があり MATLAB プロンプトに警告メッセージが表示された場合に、シミュレーションを続行します。
このオプションを選択するとアサーションが失敗するとすぐにシミュレーションが停止されるため、シミュレーション中に後で発生する可能性のあるアサーションの失敗はレポートされません。アサーションの "すべての" 失敗をレポートする場合は、このオプションを選択しないでください。
[アサーションを有効にする] によって、このパラメーターが有効になります。
パラメーター: stopWhenAssertionFail |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
アサーション信号の出力
タイム ステップごとに、以下のような Boolean 信号を出力します。
アサーションが成功した (すべての範囲が満たされている) 場合は真 (
1)。アサーションが失敗した (範囲に違反がある) 場合は偽 (
1)。
出力信号のデータ型が boolean になるのは、Simulink モデルの [コンフィギュレーション パラメーター] ダイアログ ボックスで [boolean データとして論理信号を処理] パラメーターが選択されている場合のみです。そうでない場合、出力信号のデータ型は Double です。
このパラメーターを選択すると、モデル内の任意のブロックに接続できる出力端子が追加されます。
既定: オフ
- オン
アサーションの状態を示す Boolean 信号を出力します。ブロックに端子を追加します。
- オフ
アサーションの状態を示す Boolean 信号を出力しません。
このパラメーターを使用して、複雑なアサーション ロジックを設計します。例については、Simulink Control Design と Simulink の検証ブロックを使用したモデルの検証を参照してください。
パラメーター: export |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
ブロックが開いたときにプロットを表示
Simulink モデルでブロックをダブルクリックしたときに、[ブロック パラメーター] ダイアログ ボックスではなくプロット ウィンドウを開きます。
[ブロック パラメーター] ダイアログ ボックスではなくプロット ウィンドウで範囲の追加や変更などのタスクを開いて実行する場合に、このパラメーターを使用します。プロット ウィンドウからブロック パラメーターにアクセスするには、[エディット] を選択するか、![]() をクリックします。
をクリックします。
プロットの詳細については、プロットの表示を参照してください。
既定: オフ
- オン
ブロックをダブルクリックしたときにプロット ウィンドウを開きます。
- オフ
ブロックをダブルクリックしたときに [ブロック パラメーター] ダイアログ ボックスを開きます。
パラメーター: LaunchViewOnOpen |
| 型: 文字ベクトル |
値: 'on' | 'off' |
既定: 'off' |
プロットの表示
プロット ウィンドウを開きます。
プロットを使用して以下の内容を表示します。
シミュレーション中に計算されたシステムの特性と信号
モデルをシミュレートしてシステムの特性または信号を表示する前に、このボタンをクリックしなければなりません。
プロットを右クリックし [特性] を選択して、ピーク応答時間などの追加の特性を表示できます。
範囲
範囲は、[ブロック パラメーター] ダイアログ ボックスの [範囲] タブで指定するか、プロットを右クリックし、[範囲] 、 [新規範囲] を選択して指定できます。指定できる範囲のタイプの詳細については、個々のリファレンス ページを参照してください。
範囲セグメントをドラッグするか、プロットを右クリックして [範囲] 、 [範囲の編集] を選択することで範囲を変更できます。モデルのシミュレーションを行う前に、[ブロックの更新] をクリックしてブロック パラメーターの範囲の値を更新します。
プロット ウィンドウで実行する一般的なタスクは以下のとおりです。
 をクリックするか [エディット] を選択して、[ブロック パラメーター] ダイアログ ボックスを開く。
をクリックするか [エディット] を選択して、[ブロック パラメーター] ダイアログ ボックスを開く。 をクリックするか、[ビュー] 、 [Simulink ブロックを強調表示] を選択して、プロット ウィンドウの対応するブロックを検出する。こうすると、モデル ウインドウがアクティブになり、ブロックが強調表示されます。
をクリックするか、[ビュー] 、 [Simulink ブロックを強調表示] を選択して、プロット ウィンドウの対応するブロックを検出する。こうすると、モデル ウインドウがアクティブになり、ブロックが強調表示されます。 をクリックして、モデルをシミュレートする。こうすると、指定された線形化入出力間のモデルの一部が線形化されます。
をクリックして、モデルをシミュレートする。こうすると、指定された線形化入出力間のモデルの一部が線形化されます。 をクリックして、線形システム特性のプロットに凡例を追加する。
をクリックして、線形システム特性のプロットに凡例を追加する。
メモ
[範囲] タブで指定されている設計要件を満たすようにモデル応答を最適化するには、プロット ウインドウで [ツール] 、 [応答の最適化] を選択して応答オプティマイザーを開きます。このオプションは Simulink Design Optimization™ ソフトウェアがインストールされている場合にのみ使用できます。
応答の最適化
応答オプティマイザーを開いて、[範囲] タブで指定されている設計要件を満たすようにモデル応答を最適化します。
このボタンは、Simulink Design Optimization ソフトウェアがインストールされている場合にのみ使用できます。
Design Optimization to Meet Step Response Requirements (GUI) (Simulink Design Optimization)
Design Optimization to Meet Time-Domain and Frequency-Domain Requirements (GUI) (Simulink Design Optimization)
チュートリアル
バージョン履歴
R2010b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)