このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
getSensitivity
slLinearizer または slTuner インターフェイスを使用した指定された点での感度関数
構文
説明
linsys = getSensitivity(s,pt,temp_opening)temp_opening で指定された点にある追加の一時的な開始点を考慮に入れます。開始点を使用して、たとえば、外側のループが開いた状態で内側のループの感度関数を計算します。
例
解析ポイントでの感度関数
ex_scd_simple_fdbk モデルについて、プラント入力 u での感度を取得します。
ex_scd_simple_fdbk モデルを開きます。
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);
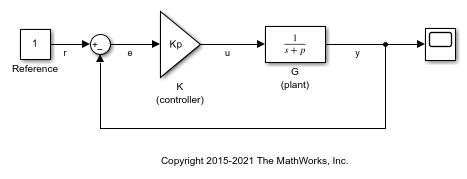
このモデルには次の項目が含まれています。
![]()
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
プラント入力 u で感度を取得するには、u を解析ポイントとして sllin に追加します。
addPoint(sllin,'u');
プラント入力 u で感度を取得します。
sys = getSensitivity(sllin,'u');
tf(sys)
ans = From input "u" to output "u": s + 5 ----- s + 8 Continuous-time transfer function.
ソフトウェアは線形化入力 du および線形化出力 u を使用して sys を計算します。
sys は du から u への伝達関数であり、![]() と等価です。
と等価です。
感度関数の計算用の一時的なループ開始点の指定
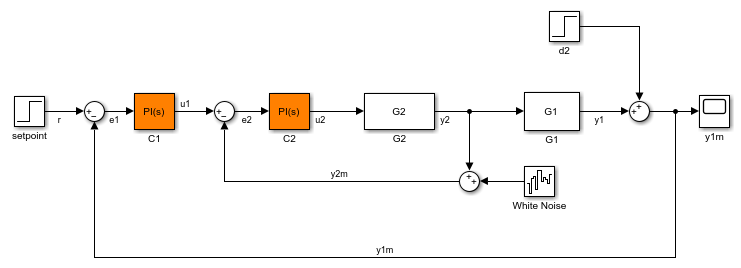
scdcascade モデルについて、外側のループが開いた状態で G2 の出力における内側のループの感度を取得します。
scdcascade モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
G2 の出力で感度を計算するには、y2 信号を解析ポイントとして使用します。外側のループの影響を取り除くには、y1m で外側のループを中断します。これら両方の点を sllin に追加します。
addPoint(sllin,{'y2','y1m'});
外側のループが開いた状態で、y2 での感度を取得します。
sys = getSensitivity(sllin,'y2','y1m');
ここで、3 番目の入力引数 'y1m' は、外側のループの一時的な開始点を指定します。
特定のパラメーター組み合わせでの感度関数の取得
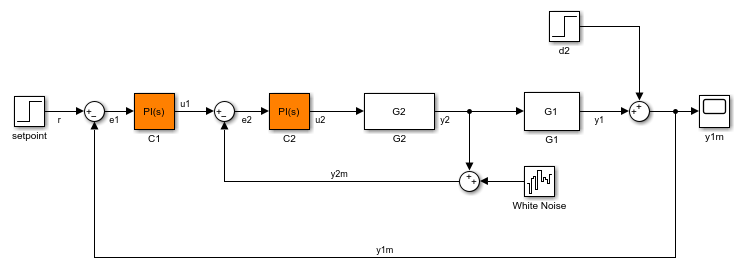
複数の伝達関数に対して scdcascade モデルをバッチ線形化するとします。ほとんどの線形化では、C2 コントローラーの比例ゲイン (Kp2) と積分ゲイン (Ki2) を 10% の範囲で変化させます。この例では、外側のループが開いた状態で、Kp2 および Ki2 の最大値について G2 の出力での感度を取得します。
scdcascade モデルを開きます。
mdl = 'scdcascade';
open_system(mdl)
モデルの slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl);
C2 コントローラーの比例ゲイン (Kp2) および積分ゲイン (Ki2) を 10% の範囲で変化させます。
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid] = ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
G2 の出力で感度を計算するには、y2 信号を解析ポイントとして使用します。外側のループの影響を取り除くには、y1m で外側のループを中断します。これら両方の点を解析ポイントとして sllin に追加します。
addPoint(sllin,{'y2','y1m'});
Ki2 および Kp2 の最大値のインデックスを決定します。
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
指定されたパラメーターの組み合わせで、G2 の出力における感度を取得します。
sys = getSensitivity(sllin,'y2','y1m',mdl_index);
感度関数からのオフセットの取得
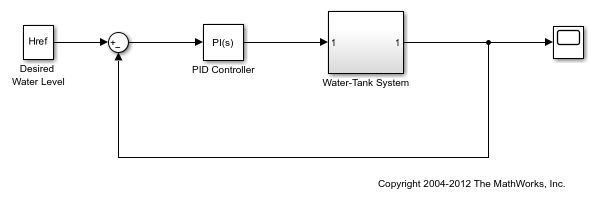
Simulink モデルを開きます。
mdl = 'watertank';
open_system(mdl)
線形化オプション セットを作成し、StoreOffsets オプションを設定します。
opt = linearizeOptions('StoreOffsets',true);
slLinearizer インターフェイスを作成します。
sllin = slLinearizer(mdl,opt);
タンクの出力端子で解析ポイントを追加します。
addPoint(sllin,'watertank/Water-Tank System');
解析ポイントで感度関数を計算し、対応する線形化オフセットを取得します。
[sys,info] = getSensitivity(sllin,'watertank/Water-Tank System');
オフセットを表示します。
info.Offsets
ans =
struct with fields:
x: [2x1 double]
dx: [2x1 double]
u: 1
y: 1
StateName: {2x1 cell}
InputName: {'watertank/Water-Tank System'}
OutputName: {'watertank/Water-Tank System'}
Ts: 0
入力引数
pt — 解析ポイント信号名
文字ベクトル | string | 文字ベクトルの cell 配列 | string 配列
解析ポイント信号名。以下で指定します。
文字ベクトルまたは string — 解析ポイント信号名。
解析ポイントに関連付けられた信号名を確認するには、
sと入力します。MATLAB® コマンド ウィンドウにsの内容が表示されます。これには、解析ポイント信号名、ブロック名および端子番号が含まれます。解析ポイントに信号名がなく、ブロック名と端子番号のみがあるとします。ブロック名としてptを指定できます。sの解析ポイントのリストにないポイントを使用するには、最初にaddPointを使用してポイントを追加します。完全な信号名またはブロック名の一意的に一致する部分として
ptを指定できます。解析ポイントの完全な信号名が'LoadTorque'であるとします。'Torque'がsの他の解析ポイントの信号名の一部でない限り、ptを'Torque'と指定できます。たとえば、
pt = 'y1m'とします。文字ベクトルの cell 配列または string 配列 — 複数の解析ポイント名を指定します。たとえば、
pt = {'y1m','y2m'}とします。
linsys を計算するために、ソフトウェアは pt で線形化入力を追加し、その後に線形化出力を追加します。
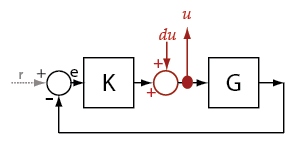
以下のモデルを考えます。

'u' として pt を指定します。
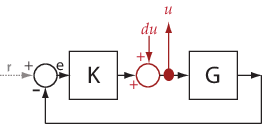
ソフトウェアは、du から u への伝達関数として linsys を計算します。
pt を複数の信号として指定する場合 (たとえば、pt = {'u','y'})、ソフトウェアは各点で線形化入力を追加し、その後に線形化出力を追加します。
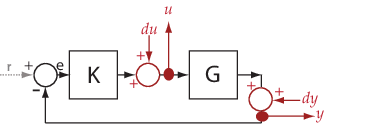
du と dy は線形化入力で、u と y は線形化出力です。ソフトウェアは、各線形化入力から各線形化出力への伝達関数をもつ MIMO 伝達関数として linsys を計算します。
出力引数
詳細
感度関数
"感度関数" は単純に "感度" とも呼ばれ、加法的な外乱に対する信号の感度の度合いを測るものです。感度は閉ループ測定です。開ループ ゲインが 1 より大きくなる周波数帯域では、フィードバックにより感度が下がります。
解析ポイント x で感度を計算するために、ソフトウェアはその点に外乱信号 dx を挿入します。そこで、dx から x への伝達関数を計算します。これは、x での感度関数と同じです。
| Simulink モデルでの解析ポイント | getSensitivity による解析ポイントの解釈 | 感度関数 |
|---|---|---|
|
|
|
|

たとえば、u での感度関数を計算する次のモデルについて考えます。
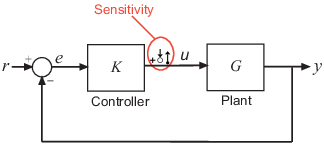
ここでは、ソフトウェアは u で外乱信号 (du) を挿入します。u での感度 Su は、du から u への伝達関数です。ソフトウェアは次のように Su を計算します。
ここで、I は KG と同じサイズの単位行列です。
同様に、y で感度を計算するために、ソフトウェアは y に外乱信号 (dy) を挿入します。ソフトウェアは、dy から y への伝達関数として感度関数を計算します。この伝達関数は (I+GK)-1 と同じです。ここで、I は GK と同じサイズの単位行列です。
ソフトウェアは、感度伝達関数を計算する際に Simulink モデルを変更しません。
バージョン履歴
R2013b で導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)