Zero-Pole
零点-極-ゲイン伝達関数を使用してシステムをモデル化する
ライブラリ:
Simulink /
Continuous
説明
Zero-Pole ブロックは、ラプラス領域の伝達関数の零点、極、およびゲインを指定して定義したシステムをモデル化します。このブロックを使用して、単入力単出力 (SISO) システムと単入力多出力 (SIMO) システムの両方をモデル化できます。
Zero-Pole ブロックには、次の要件があります。
伝達関数は次に示す形式でなければなりません。
ここで、Z は零点を表し、P は極を表し、K は伝達関数のゲインを表します。
極の数は零点の数以上でなければなりません。
複素数の極と零点は、複素共役対でなければなりません。
多出力システムでは、すべての伝達関数が同じ極をもっている必要があります。零点の値は異なっていてもかまいませんが、各伝達関数の零点の数は同じにする必要があります。
ヒント
伝達関数がそれぞれ、異なる数の零点または単一の零点をもつ多出力システムをモデル化するには、複数の Zero-Pole ブロックを使用します。
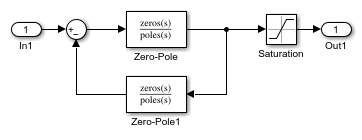
単出力システムのモデル化
単出力システムに、スカラーの時間領域入力信号と出力信号が含まれています。このタイプのシステムをモデル化するには、以下のようにします。
伝達関数の零点ベクトルを [零点] フィールドに入力します。
伝達関数の極ベクトルを [極] フィールドに入力します。
伝達関数のゲインのスカラーを [ゲイン] フィールドに入力します。
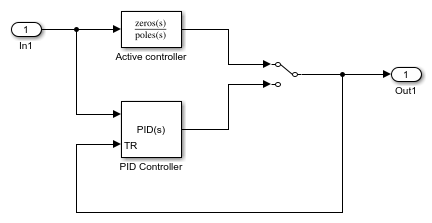
多出力システムのモデル化
多出力システムに、スカラーの時間領域入力信号とベクトルの時間領域出力信号が含まれています。ベクトル出力の各要素はシステムの出力です。このタイプのシステムをモデル化するには、以下のようにします。
零点の行列を [零点] フィールドに入力します。
行列の各列には、伝達関数の零点が入ります。伝達関数はシステムの入力信号を出力信号の要素の 1 つに関連付けます。
そのシステムのすべての伝達関数に共通な極ベクトルを [極] フィールドに入力します。
ゲインのベクトルを[ゲイン] フィールドに入力します。
各要素は、零点行列内の対応する伝達関数のゲインです。
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
直達 |
|
多次元信号 |
|
可変サイズの信号 |
|
ゼロクロッシング検出 |
|
ヒント
Zero-Pole ブロック アイコンにおける伝達関数の外観は、零点と極とゲインの各パラメーターをどのように指定したかによって異なります。
個々のパラメーターを式またはベクトルで指定すると、ブロックには伝達関数が指定された零点と極とゲインで表記されます。小かっこ内に変数を指定すると、その変数は評価されます。
たとえば、このイメージは、[零点] パラメーターを
[3 2 1]、[極] パラメーターを(poles)(polesは値が[7 5 3 1]の変数)、[ゲイン] パラメーターをgainとして指定した場合にブロックがどのように表示されるのかを示しています。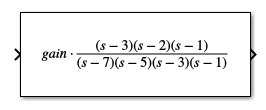
各パラメーターを変数として指定すると、ブロックでは、[ゲイン] パラメーターの値を定義する変数の名前が表示され、その後に汎用伝達関数が示されます。
たとえば、このイメージは、[零点] パラメーターを変数
zeros、[極] パラメーターを変数poles、[ゲイン] パラメーターを変数gainとして指定した場合にブロックがどのように表示されるのかを示しています。
パラメーター値を使用して伝達関数を表示するにはブロックの大きさが不十分な場合は、分子が
zeros(s)、分母がpoles(s)として伝達関数が示されます。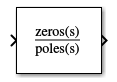
拡張機能
バージョン履歴
R2006a より前に導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)