このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
Simulink.sdi.enablePCTSupport
並列シミュレーションからシミュレーション データ インスペクターにデータをインポートするタイミングを制御
説明
Simulink.sdi.enablePCTSupport( は、mode)mode によって指定されたモードに従って、並列ワーカーからシミュレーション データ インスペクターへのデータ インポートを設定します。シミュレーション データ インスペクターは、ローカル ワーカーのデータのみ、またはローカル ワーカーとリモート ワーカーのデータをインポートするように設定できます。モードを手動に設定することもできます。これにより、関数 Simulink.sdi.sendWorkerRunToClient を使用して実行をシミュレーション データ インスペクターに手動でインポートできます。既定では、シミュレーション データ インスペクターは手動インポート モードに設定されています。
例
入力引数
代替機能
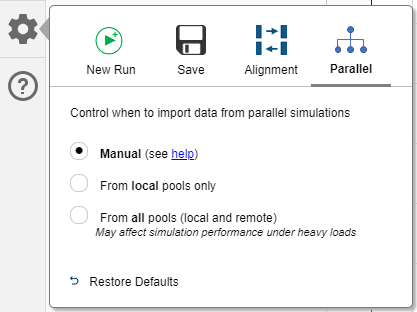
[基本設定] 、 [並列] を選択することで、シミュレーション データ インスペクターで並列計算サポート モードを変更することができます。
バージョン履歴
R2017b で導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)