このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
MIMO システムのモーダル パラメーター
いくつかのバーストのランダム ノイズで励起される 2 入力/3 出力システムの固有振動数、減衰比、モード形状を計算します。各バーストは 1 秒間持続し、各バーストの終了と次の開始の間は 2 秒間です。データは 4 kHz でサンプリングされています。
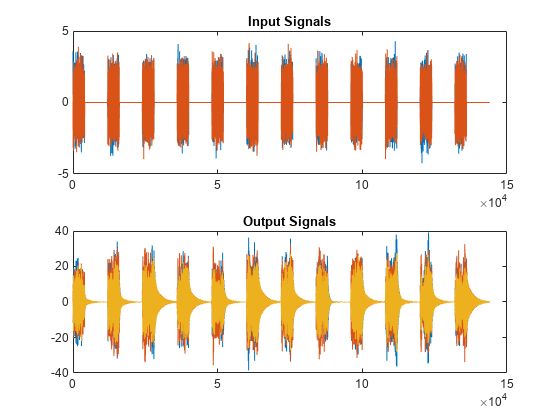
データ ファイルを読み込みます。入力信号と出力信号をプロットします。
load modaldata subplot(2,1,1) plot(Xburst) title('Input Signals') subplot(2,1,2) plot(Yburst) title('Output Signals')
周波数応答関数を計算します。長さがバースト周期に等しく、隣接するセグメント間のオーバーラップがない箱型ウィンドウを指定します。
burstLen = 12000; [frf,f] = modalfrf(Xburst,Yburst,fs,burstLen);
安定化ダイアグラムを可視化して、安定した固有振動数を返します。最大モデル次数として 30 モードを指定します。
figure
modalsd(frf,f,fs,'MaxModes',30);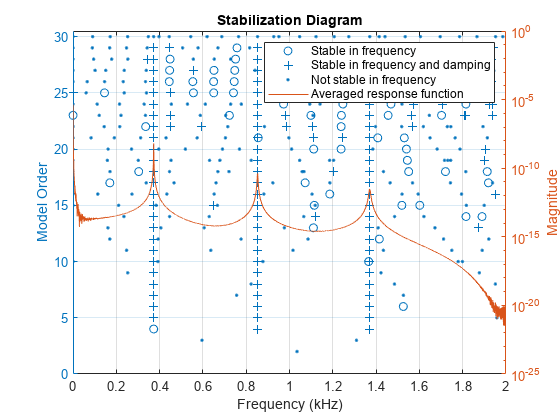
プロットを拡大します。平均応答関数は 373 Hz、852 Hz、1371 Hz で最大値をもち、これはシステムの物理周波数に対応します。最大値を変数に保存します。
phfr = [373 852 1371];
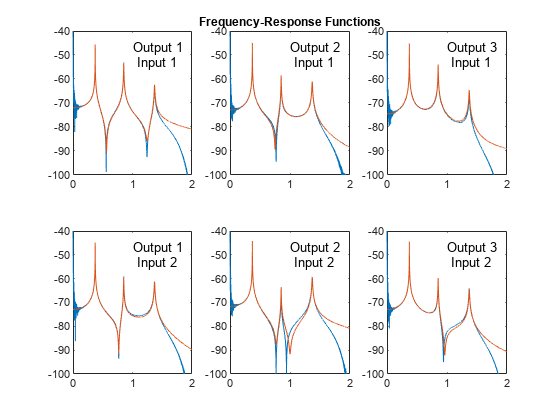
最小二乗複素指数 (LSCE) アルゴリズムを使用してモーダル パラメーターを計算します。モデル次数として 6 モードを指定し、安定化ダイアグラムから決定された物理周波数として 3 モードを指定します。関数により、各入力基準に対して固有振動数と減衰比の 1 つのセットが生成されます。
[fn,dr,ms,ofrf] = modalfit(frf,f,fs,6,'PhysFreq',phfr);再構成された周波数応答関数をプロットし、元のものと比較します。
for k = 1:2 for m = 1:3 subplot(2,3,m+3*(k-1)) plot(f/1000,10*log10(abs(frf(:,m,k)))) hold on plot(f/1000,10*log10(abs(ofrf(:,m,k)))) hold off text(1,-50,[['Output ';' Input '] num2str([m k]')]) ylim([-100 -40]) end end subplot(2,3,2) title('Frequency-Response Functions')
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)