このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
orderwaveform
振動信号から時間領域の次数波形を抽出
構文
説明
例
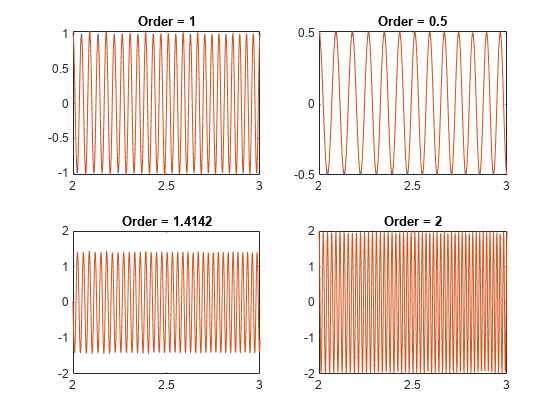
4 つの次数をもつチャープの次数波形
600 Hz で 5 秒間サンプリングされたシミュレーション信号を作成します。テスト中のシステムは、観察期間中に回転速度を 1 秒あたり 10 回転から 40 回転 (つまり、1 分あたり 600 回転から 2400 回転) に上昇させます。
タコメーターの読み取り値を生成します。
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
信号は、1、1/2、√2 および 2 の次数をもつ、調和的に関連した 4 つのチャープで構成されています。チャープの振幅はそれぞれ 1、1/2、√2 および 2 です。チャープを生成するために、台形則を使用して位相を回転速度の積分で表します。
ord = [1 0.5 sqrt(2) 2]; amp = [1 0.5 sqrt(2) 2]; ph = 2*pi*cumtrapz(rpm/60)/fs; x(1,:) = amp(1)*cos(ord(1)*ph); x(2,:) = amp(2)*cos(ord(2)*ph); x(3,:) = amp(3)*cos(ord(3)*ph); x(4,:) = amp(4)*cos(ord(4)*ph); xsum = sum(x);
信号を構成する時間領域の波形を再構成します。
xrec = orderwaveform(xsum,fs,rpm,ord);
結果を可視化します。過渡状態が減衰した後に発生する時間間隔を拡大します。
for kj = 1:4 subplot(2,2,kj) plot(t,x(kj,:),t,xrec(:,kj)) title(['Order = ' num2str(ord(kj))]) xlim([2 3]) end
クロッシング次数の波形抽出
異なる 2 つのモーターに対応する 2 つのクロッシング次数から構成されるシミュレートされた振動信号を作成します。信号は、300 Hz で 3 秒間サンプリングされます。測定中に、最初のモーターの回転速度は 1 秒あたり 10 から 100 回転 (または、600 から 6000 回転) に上昇します。同じ期間に、2 番目のモーターの回転速度は 1 秒あたり 50 から 70 回転 (または、3000 から 4200 回転) に上昇します。
fs = 300; nsamp = 3*fs; rpm1 = linspace(10,100,nsamp)'*60; rpm2 = linspace(50,70,nsamp)'*60;
測定信号は最初のモーターに対する次数が 1.2、振幅が 2√2 です。2 番目のモーターに対しては、信号の次数が 0.8、振幅が 4√2 です。
x = [2 4]*sqrt(2).*cos(2*pi*cumtrapz([1.2*rpm1 0.8*rpm2]/60)/fs);
周波数範囲の中央で、最初のモーターの共振を励起させます。
y = [1+1./(1+linspace(-10,10,nsamp).^4)'/2 ones(nsamp,1)].*x; x = sum(y,2);
rpmfreqmap を使用して次数を可視化します。
rpmfreqmap(x,fs,rpm1)
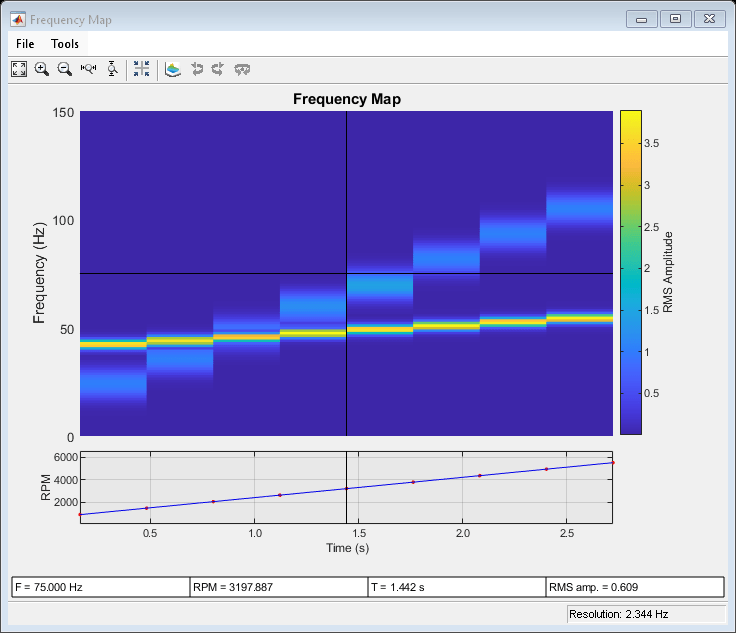
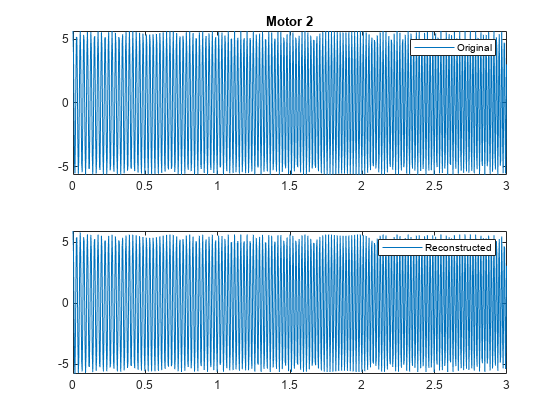
信号を構成する時間領域の波形を再構成します。ボルド・カルマン アルゴリズムを使用して、クロッシング次数を分離できます。
xrec = orderwaveform(x,fs,[rpm1 rpm2],[1.2 0.8],[1 2],'Decouple',true);元の波形と再構成した波形をプロットします。
for kj = 1:2 figure(kj) subplot(2,1,1) plot((0:nsamp-1)/fs,y(:,kj)) legend('Original') title(['Motor ' int2str(kj)]) subplot(2,1,2) plot((0:nsamp-1)/fs,xrec(:,kj)) legend('Reconstructed') end
入力引数
出力引数
参照
[1] Feldbauer, Christian, and Robert Höldrich. “Realization of a Vold-Kalman Tracking Filter — A Least Squares Problem.” Proceedings of the COST G-6 Conference on Digital Audio Effects (DAFX-00). Verona, Italy, December 7–9, 2000.
[2] Vold, Håvard, and Jan Leuridan. “High Resolution Order Tracking at Extreme Slew Rates Using Kalman Tracking Filters.” Shock and Vibration. Vol. 2, 1995, pp. 507–515.
拡張機能
バージョン履歴
R2016b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)