このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ordertrack
振動信号の次数の大きさの追跡および抽出
構文
説明
[___] = ordertrack(___, は、Name,Value)Name,Value ペアを使用してオプションをさらに指定します。一部のオプションは、ボルド・カルマン追跡手続きにのみ適用されます。
出力引数を設定せずに ordertrack(___) を使用すると、現在の Figure に時間依存次数および RPM 値がプロットされます。
例
4 つの次数をもつチャープの次数の大きさ
600 Hz で 5 秒間サンプリングされたシミュレーション信号を作成します。テスト中のシステムは、観察期間中に回転速度を 1 秒あたり 10 回転から 40 回転 (つまり、1 分あたり 600 回転から 2400 回転) に上昇させます。
タコメーターの読み取り値を生成します。
fs = 600; t1 = 5; t = 0:1/fs:t1; f0 = 10; f1 = 40; rpm = 60*linspace(f0,f1,length(t));
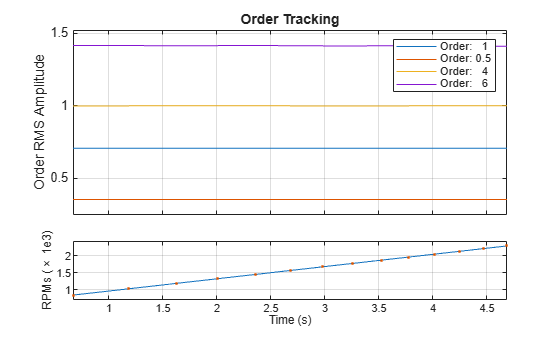
信号は、1、0.5、4 および 6 の次数をもつ、調和的に関連した 4 つのチャープで構成されています。チャープの振幅はそれぞれ 1、1/2、√2 および 2 です。チャープを生成するために、台形則を使用して位相を回転速度の積分で表します。
o1 = 1; o2 = 0.5; o3 = 4; o4 = 6; a1 = 1; a2 = 0.5; a3 = sqrt(2); a4 = 2; ph = 2*pi*cumtrapz(rpm/60)/fs; x = [a1 a2 a3 a4]*cos([o1 o2 o3 o4]'*ph);
次数の大きさを抽出して可視化します。
ordertrack(x,fs,rpm,[o1 o2 o3 o4])
クロッシング次数の追跡
異なる 2 つのモーターに対応する 2 つのクロッシング次数から構成されるシミュレートされた振動信号を作成します。信号は、300 Hz で 3 秒間サンプリングされます。測定中に、最初のモーターの回転速度は 1 秒あたり 10 回転から 100 回転 (つまり、1 分あたり 600 回転から 6000 回転) に上昇します。同じ期間に、2 番目のモーターの回転速度は 1 秒あたり 50 回転から 70 回転 (または、1 分あたり 3000 回転から 4200 回転) に上昇します。
fs = 300; nsamp = 3*fs; rpm1 = linspace(10,100,nsamp)'*60; rpm2 = linspace(50,70,nsamp)'*60;
測定信号は最初のモーターに対する次数が 1.2、振幅が 2√2 です。2 番目のモーターに対しては、信号の次数が 0.8、振幅が 4√2 です。
x = [2 4]*sqrt(2).*cos(2*pi*cumtrapz([1.2*rpm1 0.8*rpm2]/60)/fs);
周波数範囲の中央で、最初のモーターの共振を励起させます。
rs = [1+1./(1+linspace(-10,10,nsamp).^4)'/2 ones(nsamp,1)]; x = sum(rs.*x,2);
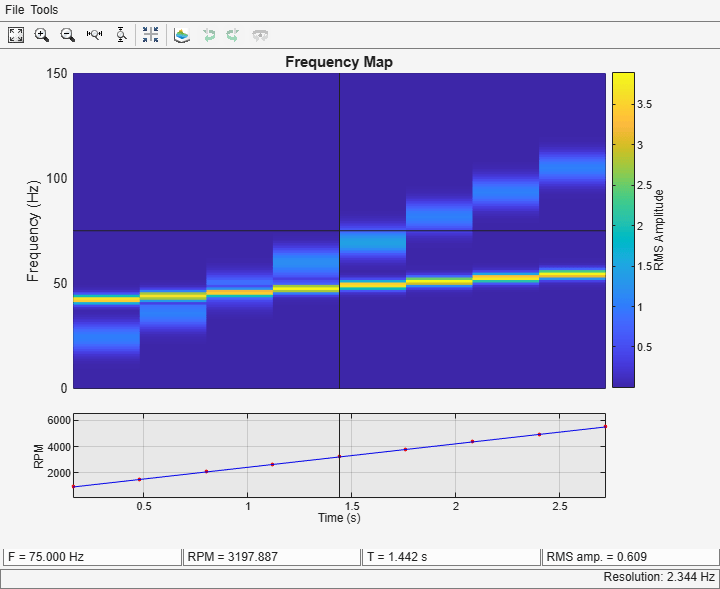
rpmfreqmap を使用して次数を可視化します。
rpmfreqmap(x,fs,rpm1)
両方のモーターの次数の大きさを RPM の関数として計算します。ボルド・カルマン アルゴリズムを使用して、クロッシング次数を分離できます。
ordertrack(x,fs,[rpm1 rpm2],[1.2 0.8],[1 2],'Decouple',true)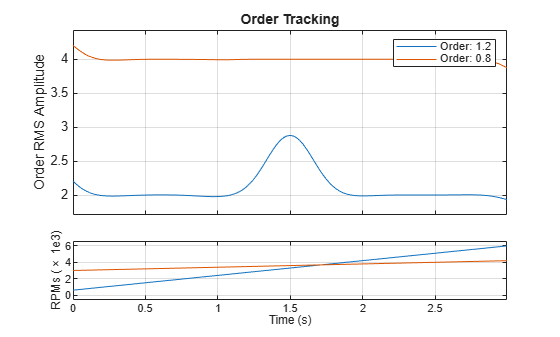
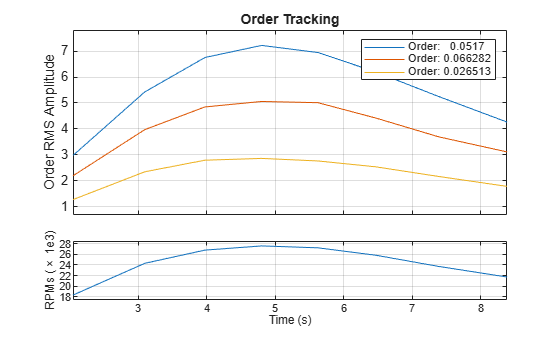
ヘリコプターの振動データの次数の追跡
ヘリコプターのコクピットに設置された加速度計から取得したシミュレーション データを解析します。
ヘリコプターのデータを読み込みます。振動測定値 vib は、500 Hz のレートで 10 秒間サンプリングされています。データの調査から、データには線形トレンドがあることがわかります。トレンドを除去して、トレンドによる次数推定の質の低下を防ぎます。
load('helidata.mat')
vib = detrend(vib);次数-RPM マップを計算します。0.005 の次数分解能を指定します。
[map,order,rpm,time,res] = rpmordermap(vib,fs,rpm,0.005);
信号の平均次数スペクトルを計算してプロットします。スペクトルの最も高いピークを 3 つ求めます。
[spectrum,specorder] = orderspectrum(map,order); [~,pkords] = findpeaks(spectrum,specorder,'SortStr','descend','Npeaks',3); findpeaks(spectrum,specorder,'SortStr','descend','Npeaks',3)
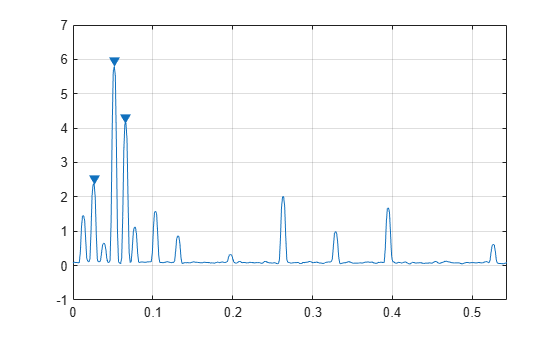
最も高い 3 つのピークの振幅を追跡します。
ordertrack(map,order,rpm,time,pkords)
入力引数
出力引数
参照
[1] Brandt, Anders. Noise and Vibration Analysis: Signal Analysis and Experimental Procedures. Chichester, UK: John Wiley & Sons, 2011.
[2] Feldbauer, Christian, and Robert Höldrich. "Realization of a Vold-Kalman Tracking Filter — A Least Squares Problem." Proceedings of the COST G-6 Conference on Digital Audio Effects (DAFX-00). Verona, Italy, December 7–9, 2000.
[3] Vold, Håvard, and Jan Leuridan. "High Resolution Order Tracking at Extreme Slew Rates Using Kalman Tracking Filters." Shock and Vibration. Vol. 2, 1995, pp. 507–515.
[4] Tůma, Jiří. “Algorithms for the Vold-Kalman Multiorder Tracking Filter.” Proceedings of the 14th International Carpathian Control Conference (ICCC), 2013, pp. 388–94. https://doi.org/10.1109/CarpathianCC.2013.6560575.
拡張機能
バージョン履歴
R2016b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)