Bushing Joint
3 つの直進プリミティブと 3 つの回転プリミティブをもつジョイント

ライブラリ:
Simscape /
Multibody /
Joints
説明
Bushing Joint ブロックは、並進自由度 3、回転自由度 3 のジョイントをモデル化します。このジョイントにより、follower 座標系は base 座標系を基準にして、3 つの直交並進とそれに続く 3 つの回転のシーケンスを介して空間変換を実行できます。次の図は、特定のシミュレーション タイム ステップでジョイントの変換が発生するシーケンスを示しています。
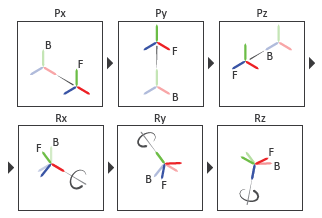
それぞれの変換の結果として得られる座標系が次の変換の base 座標系となります。3 次元の回転はシーケンスとして発生するため、2 つの軸が揃う可能性があり、それによって回転自由度が 1 つ失われることがあります。この現象は、ジンバル ロックとして知られています。
ジョイント プリミティブの初期状態のターゲットを指定するには、[State Targets] の下にあるパラメーターを使用します。ターゲットは base 座標系で指定されます。ターゲットの優先順位レベルも設定できます。ジョイントがすべての状態ターゲットを満たすことができない場合、優先順位レベルに基づいて、どのターゲットを先に満たすか、およびそれらをどの程度正確に満たすかが決まります。例については、アセンブリのガイドを参照してください。
ジョイント プリミティブの減衰とバネの動作をモデル化するには、[Internal Mechanics] の下にあるパラメーターを使用します。エネルギーの散逸をモデル化するには [Damping Coefficient] パラメーターを使用し、エネルギーの蓄積をモデル化するには [Spring Stiffness] パラメーターを使用します。ジョイントのバネは、ジョイント プリミティブを平衡位置から変位させようとします。ジョイント ダンパーはエネルギーの散逸要素として機能します。バネとダンパーは厳密に線形です。
ジョイント プリミティブの範囲を指定するには、[Limits] の下にあるパラメーターを使用します。下限と上限で自由領域の幅を定義します。このブロックは、ジョイントの位置がこの範囲を超えると、ジョイントの位置をこの自由領域に戻すよう加速する力を適用します。このブロックは、平滑化されたバネ-ダンパー手法を使用してその力を計算します。平滑化されたバネ-ダンパー手法の詳細については、Spatial Contact Force ブロックのDescriptionセクションを参照してください。
シミュレーション中のジョイント プリミティブの運動は、[Actuation] セクションの [Force] パラメーター、[Torque] パラメーター、および [Motion] パラメーターによって制御されます。詳細については、ジョイントの作動入力の指定を参照してください。さらに、ジョイント ブロックには位置、速度、加速度、力、トルクなどの検出データを出力する端子があり、これを使用してモデルに対する解析タスクを実行できます。詳細については、検出と力とトルクの検出を参照してください。
ジョイント モード構成を指定するには、[Mode] パラメーターを使用します。詳細については、[Parameters] セクションと [Ports] セクションの [Motion Configuration] を参照してください。
例

端子
座標系
B — base 座標系
座標系
ジョイント ブロックの base 座標系。
F — follower 座標系
座標系
ジョイント ブロックの follower 座標系。
入力
fx — 作動力
物理量信号
ジョイント プリミティブに対する作動力を受け入れる物理量信号入力端子。ブロックは、base 座標系の "x" 軸に沿って、ジョイントの base 座標系と follower 座標系にこの力を均等かつ反対に適用します。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Actuation] で、[Force] を [Provided by Input] に設定します。
px — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の "x" 軸に沿った、base 座標系に対する follower 座標系の変位を決定します。この信号には変位の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Actuation] で、[Motion] を [Provided by Input] に設定します。
fy — 作動力
物理量信号
ジョイント プリミティブに対する作動力を受け入れる物理量信号入力端子。ブロックは、base 座標系の "y" 軸に沿って、ジョイントの base 座標系と follower 座標系にこの力を均等かつ反対に適用します。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Actuation] で、[Force] を [Provided by Input] に設定します。
py — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の "y" 軸に沿った、base 座標系に対する follower 座標系の変位を決定します。この信号には変位の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Actuation] で、[Motion] を [Provided by Input] に設定します。
fz — 作動力
物理量信号
ジョイント プリミティブに対する作動力を受け入れる物理量信号入力端子。ブロックは、base 座標系の "z" 軸に沿って、ジョイントの base 座標系と follower 座標系にこの力を均等かつ反対に適用します。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Actuation] で、[Force] を Provided by Input に設定します。
pz — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の "z" 軸に沿った、base 座標系に対する follower 座標系の変位を決定します。この信号には変位の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Actuation] で [Motion] を Provided by Input に設定します。
tx — 作動トルク
物理量信号
ジョイント プリミティブに対する作動トルクを受け入れる物理量信号入力端子。ブロックは、ジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを均等かつ反対に適用します。トルクは、base 座標系の x 軸を中心にして適用されます。follower 座標系と base 座標系の x 軸はシミュレーション時に揃えられます。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Actuation] で、[Torque] を [Provided by Input] に設定します。
qx — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の x 軸を中心にした、base 座標系を基準とする follower 座標系の回転を決定します。この信号には回転の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Actuation] で、[Motion] を [Provided by Input] に設定します。
ty — 作動トルク
物理量信号
ジョイント プリミティブに対する作動トルクを受け入れる物理量信号入力端子。ブロックは、ジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを均等かつ反対に適用します。トルクは、base 座標系の y 軸を中心にして適用されます。follower 座標系と base 座標系の y 軸はシミュレーション時に揃えられます。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Actuation] で、[Torque] を [Provided by Input] に設定します。
qy — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の y 軸を中心にした、base 座標系を基準とする follower 座標系の回転を決定します。この信号には回転の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Actuation] で、[Motion] を [Provided by Input] に設定します。
tz — 作動トルク
物理量信号
ジョイント プリミティブに対する作動トルクを受け入れる物理量信号入力端子。ブロックは、ジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを均等かつ反対に適用します。トルクは、base 座標系の z 軸を中心にして適用されます。follower 座標系と base 座標系の z 軸はシミュレーション時に揃えられます。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Actuation] で [Torque] を Provided by Input に設定します。
qz — 運動プロファイル
物理量信号
ジョイント プリミティブに対する運動プロファイルを受け入れる物理量信号入力端子。ブロックはこの信号を使用して、base 座標系の z 軸を中心にした、base 座標系を基準とする follower 座標系の回転を決定します。この信号には回転の 1 階微分および 2 階微分も含まれていなければなりません。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Actuation] で [Motion] を Provided by Input に設定します。
mode — ジョイント モード制御
スカラー
ジョイントのモードを制御する入力端子。信号は単位なしのスカラーです。ジョイント モードは、入力信号が 0 の場合はノーマル、入力信号が -1 の場合は解放、入力信号が 1 の場合はロックになります。モードはシミュレーション中にいつでも変更できます。
次の表は、モード間の遷移時にジョイントの位置と速度がどのように変化するかを示しています。
| 遷移 | 位置 | 速度 |
|---|---|---|
| ノーマルからロック | ジョイントの位置は現在の値のまま維持され、一定に保たれます。 | ジョイントの速度はゼロになり、一定に保たれます。 |
| ノーマルから解放 | ジョイントの位置は、力またはトルクによって変化が生じるまで現在の値のまま維持されます。 | ジョイントの速度は、力またはトルクによって変化が生じるまで現在の値のまま維持されます。 |
| ロックからノーマル | ジョイントの位置は、力またはトルクによって変化が生じるまで現在の値のまま維持されます。 | ジョイントの速度は、力またはトルクによって変化が生じるまでゼロのまま維持されます。 |
| ロックから解放 | ジョイントの位置は、力またはトルクによって変化が生じるまで現在の値のまま維持されます。 | ジョイントの速度は、力またはトルクによって変化が生じるまでゼロのまま維持されます。 |
| 解放からノーマル | ジョイントの自由度 (DOF) と一致する方向の場合、ジョイント プリミティブの位置にはニュートン法で計算された値が使用されます。このような位置は、力またはトルクによって変化が開始されるまでその値のまま維持されます。拘束方向では、ジョイント プリミティブの位置はゼロになり、一定に保たれます。 | ジョイントの DOF と一致する方向の場合、ジョイント プリミティブの速度は、力またはトルクによって変化が開始されるまで現在の値のまま維持されます。拘束方向では、ジョイント プリミティブの速度はゼロになり、一定に保たれます。 |
| 解放からロック | ジョイントの DOF と一致する方向の場合、ジョイント プリミティブの位置にはニュートン法で計算された値が使用され、一定に保たれます。拘束方向では、ジョイント プリミティブの位置はゼロになり、一定に保たれます。 | ジョイントの速度はゼロになり、一定に保たれます。 |
依存関係
この端子を有効にするには、[Mode Configuration] で [Mode] を Provided by Input に設定します。
出力
px — プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。値は、base 座標系の "x" 方向における、base 座標系に対する follower 座標系の変位です。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Position] を選択します。
vx — プリミティブの速度
物理量信号
ジョイント プリミティブの速度を出力する物理量信号端子。この値は、端子 px からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Velocity] を選択します。
ax — プリミティブの加速度
物理量信号
ジョイント プリミティブの加速度を出力する物理量信号端子。この値は、端子 px からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Acceleration] を選択します。
fx — ジョイント プリミティブに作用するアクチュエータの力
物理量信号
ジョイント プリミティブに作用するアクチュエータの力を出力する物理量信号端子。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Actuator Force] を選択します。
fllx — 下限の力
物理量信号
下限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Lower-Limit Force] を選択します。
fulx — 上限の力
物理量信号
上限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[X Prismatic Primitive (Px)] 、 [Sensing] で、[Upper-Limit Force] を選択します。
py — プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。値は、base 座標系の "y" 方向における、base 座標系に対する follower 座標系の変位です。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Position] を選択します。
vy — プリミティブの速度
物理量信号
ジョイント プリミティブの速度を出力する物理量信号端子。この値は、端子 py からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Velocity] を選択します。
ay — プリミティブの加速度
物理量信号
ジョイント プリミティブの加速度を出力する物理量信号端子。この値は、端子 py からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Acceleration] を選択します。
fy — ジョイント プリミティブに作用するアクチュエータの力
物理量信号
ジョイント プリミティブに作用するアクチュエータの力を出力する物理量信号端子。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Actuator Force] を選択します。
flly — 下限の力
物理量信号
下限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Lower-Limit Force] を選択します。
fuly — 上限の力
物理量信号
上限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Y Prismatic Primitive (Py)] 、 [Sensing] で、[Upper-Limit Force] を選択します。
pz — ジョイント プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。値は、base 座標系の z 軸における、base 座標系に対する follower 座標系の変位です。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Position] を選択します。
vz — ジョイント プリミティブの速度
物理量信号
ジョイント プリミティブの速度を出力する物理量信号端子。この値は、端子 [pz] からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Velocity] を選択します。
az — ジョイント プリミティブの加速度
物理量信号
ジョイント プリミティブの加速度を出力する物理量信号端子。この値は、端子 [pz] からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Acceleration] を選択します。
fz — ジョイント プリミティブに作用するアクチュエータの力
物理量信号
ジョイント プリミティブに作用するアクチュエータの力を出力する物理量信号端子。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Actuator Force] を選択します。
fllz — ジョイント プリミティブに作用する下限の力
物理量信号
下限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Lower-Limit Force] を選択します。
fulz — ジョイント プリミティブに作用する上限の力
物理量信号
上限の力を出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこの力を適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこの力を適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Prismatic Primitive (Pz)] 、 [Sensing] で、[Upper-Limit Force] を選択します。
qx — ジョイント プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。この値は、base 座標系の x 軸を中心にして base 座標系を基準にした follower 座標系の回転角度です。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Position] を選択します。
wx — ジョイント プリミティブの角速度
物理量信号
ジョイント プリミティブの角速度を出力する物理量信号端子。この値は、端子 qx からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Velocity] を選択します。
bx — ジョイント プリミティブの角加速度
物理量信号
ジョイント プリミティブの角加速度を出力する物理量信号端子。この値は、端子 qx からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Acceleration] を選択します。
tx — ジョイント プリミティブに作用するアクチュエータのトルク
物理量信号
ジョイント プリミティブに作用するアクチュエータのトルクを出力する物理量信号端子。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Actuator Torque] を選択します。
tllx — ジョイント プリミティブに作用する下限のトルク
物理量信号
下限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Lower-Limit Torque] を選択します。
tulx — ジョイント プリミティブに作用する上限のトルク
物理量信号
上限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[X Revolute Primitive (Rx)] 、 [Sensing] で、[Upper-Limit Torque] を選択します。
qy — ジョイント プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。この値は、base 座標系の y 軸を中心にして base 座標系を基準にした follower 座標系の回転角度です。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Position] を選択します。
wy — ジョイント プリミティブの角速度
物理量信号
ジョイント プリミティブの角速度を出力する物理量信号端子。この値は、端子 qy からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Velocity] を選択します。
by — ジョイント プリミティブの角加速度
物理量信号
ジョイント プリミティブの角加速度を出力する物理量信号端子。この値は、端子 qy からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Acceleration] を選択します。
ty — ジョイント プリミティブに作用するアクチュエータのトルク
物理量信号
ジョイント プリミティブに作用するアクチュエータのトルクを出力する物理量信号端子。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Actuator Torque] を選択します。
tlly — ジョイント プリミティブに作用する下限のトルク
物理量信号
下限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Lower-Limit Torque] を選択します。
tuly — ジョイント プリミティブに作用する上限のトルク
物理量信号
上限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Y Revolute Primitive (Ry)] 、 [Sensing] で、[Upper-Limit Torque] を選択します。
qz — ジョイント プリミティブの位置
物理量信号
ジョイント プリミティブの位置を出力する物理量信号端子。この値は、base 座標系の z 軸を中心にして base 座標系を基準にした follower 座標系の回転角度です。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Position] を選択します。
wz — ジョイント プリミティブの角速度
物理量信号
ジョイント プリミティブの角速度を出力する物理量信号端子。この値は、端子 [qz] からの信号の 1 階微分です。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Velocity] を選択します。
bz — ジョイント プリミティブの角加速度
物理量信号
ジョイント プリミティブの角加速度を出力する物理量信号端子。この値は、端子 [qz] からの信号の 2 階微分です。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Acceleration] を選択します。
tz — ジョイント プリミティブに作用するアクチュエータのトルク
物理量信号
ジョイント プリミティブに作用するアクチュエータのトルクを出力する物理量信号端子。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Actuator Torque] を選択します。
tllz — ジョイント プリミティブに作用する下限のトルク
物理量信号
下限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の下限を下回ると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Lower-Limit Torque] を選択します。
tulz — ジョイント プリミティブに作用する上限のトルク
物理量信号
上限のトルクを出力する物理量信号端子。ジョイント プリミティブの位置が自由領域の上限を超えると、ブロックはこのトルクを適用します。ブロックはジョイント プリミティブの base 座標系と follower 座標系の両方にこのトルクを適用し、相対位置を加速させて自由領域に戻します。
依存関係
この端子を有効にするには、[Z Revolute Primitive (Rz)] 、 [Sensing] で [Upper-Limit Torque] を選択します。
fc — Constraint Force
物理量信号
ジョイント全体に作用する拘束力を出力する物理量信号端子。この力はジョイントの並進拘束を維持します。詳細は、ジョイントの拘束力の測定を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Force] を選択します。
tc — Constraint torque
物理量信号
ジョイント全体に作用する拘束トルクを出力する物理量信号端子。このトルクはジョイントの回転拘束を維持します。詳細は、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Constraint Torque] を選択します。
ft — Total force
物理量信号
ジョイント全体に作用する合計力を出力する物理量信号端子。合計力は、一方の座標系からジョイントを通じて他方の座標系に伝達される力の和です。この力には、作動力、内力、制限力、拘束力が含まれます。詳細は、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Force] を選択します。
tt — Total torque
物理量信号
ジョイント全体に作用する合計トルクを出力する物理量信号端子。合計トルクは、一方の座標系からジョイントを通じて他方の座標系に伝達されるトルクの和です。このトルクには、作動トルク、内部トルク、制限トルク、拘束トルクが含まれます。詳細は、力とトルクの検出を参照してください。
依存関係
この端子を有効にするには、[Composite Force/Torque Sensing] で [Total Torque] を選択します。
パラメーター
ブロック パラメーターを対話的に編集するには、プロパティ インスペクターを使用します。Simulink® ツールストリップの [シミュレーション] タブの [準備] ギャラリーで [プロパティ インスペクター] を選択します。
X Prismatic Primitive (Px)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
"x" 直進プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 m (既定値) | スカラー
"x" 直進プリミティブの位置ターゲット。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 線形速度ターゲットを指定するかどうか
off (既定値) | on
"x" 直進プリミティブの線形速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 線形速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
線形速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 m/s (既定値) | スカラー
"x" 直進プリミティブの線形速度ターゲット。スカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内力が 0 となる場所
0 m (既定値) | スカラー
バネの力が 0 になる場所。長さの単位のスカラーとして指定します。
Spring Stiffness — 力の法則の剛性
0 N/m (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の剛性。線形剛性の単位のスカラーとして指定します。
Damping Coefficient — 力の法則の減衰係数
0 N(m/s) (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の減衰係数。線形減衰係数の単位のスカラーとして指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
"x" 直進プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-1 m (既定値) | スカラー
"x" 直進プリミティブの自由領域の下限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e6 N/m (既定値) | スカラー
下限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
下限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
"x" 直進プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
1 m (既定値) | スカラー
ジョイント プリミティブの自由領域の上限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e6 N/m (既定値) | スカラー
上限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
上限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Force — アクチュエータの力を提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータの力を提供するオプション。以下のいずれかの値として指定します。
| 作動力の設定 | 説明 |
|---|---|
None | アクチュエータの力なし。 |
Provided by Input | 入力端子 fx は "x" 直進プリミティブのアクチュエータの力を指定します。 |
Automatically Computed | このブロックは、機構への運動入力を満たすのに必要な力の大きさを自動的に計算します。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算された力は、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動運動の設定 | 説明 |
|---|---|
Automatically Computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 px は、ジョイント プリミティブの運動を指定します。 |
Y Prismatic Primitive (Py)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
"y" 直進プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 m (既定値) | スカラー
"y" 直進プリミティブの位置ターゲット。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 線形速度ターゲットを指定するかどうか
off (既定値) | on
"y" 直進プリミティブの線形速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 線形速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
線形速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 m/s (既定値) | スカラー
"y" 直進プリミティブの線形速度ターゲット。スカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内力が 0 となる場所
0 m (既定値) | スカラー
バネの力が 0 になる場所。長さの単位のスカラーとして指定します。
Spring Stiffness — 力の法則の剛性
0 N/m (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の剛性。線形剛性の単位のスカラーとして指定します。
Damping Coefficient — 力の法則の減衰係数
0 N(m/s) (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の減衰係数。線形減衰係数の単位のスカラーとして指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
"y" 直進プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-1 m (既定値) | スカラー
"y" 直進プリミティブの自由領域の下限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e6 N/m (既定値) | スカラー
下限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
下限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
"y" 直進プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
1 m (既定値) | スカラー
ジョイント プリミティブの自由領域の上限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e6 N/m (既定値) | スカラー
上限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
上限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Force — アクチュエータの力を提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータの力を提供するオプション。以下のいずれかの値として指定します。
| 作動力の設定 | 説明 |
|---|---|
None | アクチュエータの力なし。 |
Provided by Input | 入力端子 fy は "y" 直進プリミティブのアクチュエータの力を指定します。 |
Automatically Computed | このブロックは、機構への運動入力を満たすのに必要な力の大きさを自動的に計算します。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算された力は、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動運動の設定 | 説明 |
|---|---|
Automatically Computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 py は、ジョイント プリミティブの運動を指定します。 |
Z Prismatic Primitive (Pz)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
z 直進プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 m (既定値) | スカラー
z 直進プリミティブの位置ターゲット。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 線形速度ターゲットを指定するかどうか
off (既定値) | on
z 直進プリミティブの線形速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 線形速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
線形速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 m/s (既定値) | スカラー
z 直進プリミティブの線形速度ターゲット。スカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内力が 0 となる場所
0 m (既定値) | スカラー
バネの力が 0 になる場所。長さの単位のスカラーとして指定します。
Spring Stiffness — 力の法則の剛性
0 N/m (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の剛性。線形剛性の単位のスカラーとして指定します。
Damping Coefficient — 力の法則の減衰係数
0 N(m/s) (既定値) | スカラー
ジョイント プリミティブの内部バネ-ダンパー力の法則の減衰係数。線形減衰係数の単位のスカラーとして指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
z 直進プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-1 m (既定値) | スカラー
z 直進プリミティブの自由領域の下限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e6 N/m (既定値) | スカラー
下限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
下限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
z 直進プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
1 m (既定値) | スカラー
ジョイント プリミティブの自由領域の上限。長さの単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e6 N/m (既定値) | スカラー
上限でのバネの剛性。線形剛性の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
1e3 N/(m/s) (既定値) | スカラー
上限での減衰係数。線形減衰係数の単位のスカラーとして指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーの力を平滑化する領域
1e-4 m (既定値) | スカラー
バネとダンパーの力を平滑化する領域。長さの単位のスカラーとして指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限の力の全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイム ステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Force — アクチュエータの力を提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータの力を提供するオプション。以下のいずれかの値として指定します。
| 作動力の設定 | 説明 |
|---|---|
None | アクチュエータの力なし。 |
Provided by Input | 入力端子 fz は "z" 直進プリミティブのアクチュエータの力を指定します。 |
Automatically Computed | このブロックは、機構への運動入力を満たすのに必要な力の大きさを自動的に計算します。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算された力は、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動運動の設定 | 説明 |
|---|---|
Automatically Computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 pz は、ジョイント プリミティブの運動を指定します。 |
X Revolute Primitive (Rx)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
x 回転プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 deg (既定値) | スカラー
x 回転プリミティブの位置ターゲット。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 角速度ターゲットを指定するかどうか
off (既定値) | on
x 回転プリミティブの角速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
角速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 deg/s (既定値) | スカラー
x 回転プリミティブの角速度ターゲット。スカラーとして角速度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内部トルクがゼロになる位置
0 deg (既定値) | スカラー
バネのトルクがゼロになる位置。スカラーとして角度の単位と共に指定します。
Spring Stiffness — 力の法則の剛性
0 N*m/deg (既定値) | スカラー
x 回転プリミティブの内部バネ-ダンパー力の法則の剛性。スカラーとしてねじり剛性の単位と共に指定します。
Damping Coefficient — 力の法則の減衰係数
0 N*m/(deg/s) (既定値) | スカラー
x 回転プリミティブの内部バネ-ダンパー力の法則の減衰係数。スカラーとして減衰係数の単位と共に指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
x 回転プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-90 deg (既定値) | スカラー
x 回転プリミティブの自由領域の下限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
下限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
下限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
"x" 回転プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
90 deg (既定値) | スカラー
"x" 回転プリミティブの自由領域の上限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
上限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
上限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Torque — アクチュエータのトルクを提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータのトルクを提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
None | アクチュエータのトルクなし。 |
Provided by Input | 入力端子 tx は "x" 回転プリミティブのアクチュエータのトルクを指定します。 |
Automatically Computed | トルクはブロックによって自動的に計算されます。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算されたトルクは、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
Automatically computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 qx は "x" 回転プリミティブの運動を指定します。 |
Y Revolute Primitive (Ry)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
y 回転プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 deg (既定値) | スカラー
y 回転プリミティブの位置ターゲット。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 角速度ターゲットを指定するかどうか
off (既定値) | on
y 回転プリミティブの角速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
角速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 deg/s (既定値) | スカラー
y 回転プリミティブの角速度ターゲット。スカラーとして角速度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内部トルクがゼロになる位置
0 deg (既定値) | スカラー
バネのトルクがゼロになる位置。スカラーとして角度の単位と共に指定します。
Spring Stiffness — 力の法則の剛性
0 N*m/deg (既定値) | スカラー
y 回転プリミティブの内部バネ-ダンパー力の法則の剛性。スカラーとしてねじり剛性の単位と共に指定します。
Damping Coefficient — 力の法則の減衰係数
0 N*m/(deg/s) (既定値) | スカラー
y 回転プリミティブの内部バネ-ダンパー力の法則の減衰係数。スカラーとして減衰係数の単位と共に指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
y 回転プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-90 deg (既定値) | スカラー
y 回転プリミティブの自由領域の下限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
下限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
下限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
"y" 回転プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
90 deg (既定値) | スカラー
"y" 回転プリミティブの自由領域の上限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
上限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
上限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Torque — アクチュエータのトルクを提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータのトルクを提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
None | アクチュエータのトルクなし。 |
Provided by Input | 入力端子 ty は "y" 回転プリミティブのアクチュエータのトルクを指定します。 |
Automatically Computed | トルクはブロックによって自動的に計算されます。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算されたトルクは、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
Automatically computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 qy は "y" 回転プリミティブの運動を指定します。 |
Z Revolute Primitive (Rz)
State TargetsSpecify Position Target — 位置ターゲットを指定するかどうか
off (既定値) | on
z 回転プリミティブの位置ターゲットを指定するには、このパラメーターを選択します。
Priority — 位置ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
位置ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Value — 位置ターゲット
0 deg (既定値) | スカラー
z 回転プリミティブの位置ターゲット。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Position Target] を選択します。
Specify Velocity Target — 角速度ターゲットを指定するかどうか
off (既定値) | on
z 回転プリミティブの角速度ターゲットを指定するには、このパラメーターを選択します。
Priority — 速度ターゲットの優先順位レベル
High (desired) (既定値) | Low (approximate)
角速度ターゲットの優先順位レベル。[High (desired)] または [Low (approximate)] として指定します。詳細については、アセンブリのガイドを参照してください。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Value — 速度ターゲット
0 deg/s (既定値) | スカラー
z 回転プリミティブの角速度ターゲット。スカラーとして角速度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Velocity Target] を選択します。
Equilibrium Position — 内部トルクがゼロになる位置
0 deg (既定値) | スカラー
バネのトルクがゼロになる位置。スカラーとして角度の単位と共に指定します。
Spring Stiffness — 力の法則の剛性
0 N*m/deg (既定値) | スカラー
z 回転プリミティブの内部バネ-ダンパー力の法則の剛性。スカラーとしてねじり剛性の単位と共に指定します。
Damping Coefficient — 力の法則の減衰係数
0 N*m/(deg/s) (既定値) | スカラー
z 回転プリミティブの内部バネ-ダンパー力の法則の減衰係数。スカラーとして減衰係数の単位と共に指定します。
Specify Lower Limit — 位置の下限を指定するかどうか
off (既定値) | on
z 回転プリミティブの下限を指定するには、このパラメーターを選択します。
Bound — 自由領域の下限
-90 deg (既定値) | スカラー
z 回転プリミティブの自由領域の下限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Spring Stiffness — 下限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
下限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Damping Coefficient — 下限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
下限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、下限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Lower Limit] を選択します。
Specify Upper Limit — 位置の上限を指定するかどうか
off (既定値) | on
"z" 回転プリミティブの上限を指定するには、このパラメーターを選択します。
Bound — 自由領域の上限
90 deg (既定値) | スカラー
"z" 回転プリミティブの自由領域の上限。スカラーとして角度の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Spring Stiffness — 上限でのバネの剛性
1e4 N*m/deg (既定値) | スカラー
上限でのバネの剛性。スカラーとしてねじり剛性の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Damping Coefficient — 上限での減衰係数
10 N*m/(deg/s) (既定値) | スカラー
上限での減衰係数。スカラーとして減衰係数の単位と共に指定します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Transition Region Width — バネとダンパーのトルクを平滑化する領域
0.1 deg (既定値) | スカラー
バネとダンパーのトルクを平滑化する領域。スカラーとして角度の単位と共に指定します。
このブロックは、侵入が遷移領域の幅に達したとき、上限のトルクの全量を適用します。領域が小さいほど、力の発生がシャープになり、ソルバーの必要なタイムステップが小さくなります。シミュレーション精度とシミュレーション速度の間にはトレードオフがあり、遷移領域を小さくすると精度が向上し、大きくすると速度が向上します。
依存関係
このパラメーターを有効にするには、[Specify Upper Limit] を選択します。
Torque — アクチュエータのトルクを提供するオプション
None (既定値) | Provided by Input | Automatically Computed
ジョイント プリミティブにアクチュエータのトルクを提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
None | アクチュエータのトルクなし。 |
Provided by Input | 入力端子 tz は "z" 回転プリミティブのアクチュエータのトルクを指定します。 |
Automatically Computed | トルクはブロックによって自動的に計算されます。このパラメーターを [Automatically Computed] に設定した場合、同じジョイント プリミティブでは [Motion] を [Provided by Input] に設定する必要はありません。自動的に計算されたトルクは、機構の別の場所の運動入力を満たすために使用することもできます。 |
Motion — 運動を提供するオプション
Automatically Computed (既定値) | Provided by Input
ジョイント プリミティブに運動を提供するオプション。以下のいずれかの値として指定します。
| 作動トルクの設定 | 説明 |
|---|---|
Automatically computed | このブロックは、モデルのダイナミクスに基づいてジョイント プリミティブの運動を計算し、適用します。 |
Provided by Input | 入力端子 qz は "z" 回転プリミティブの運動を指定します。 |
Mode Configuration
Mode — ジョイント モード
Normal (既定値) | Locked | Disengaged | Provided by Input
シミュレーションのジョイント モード。以下のいずれかの値として指定します。
| 方法 | 説明 |
|---|---|
Locked | ロック モードでは、ジョイントの自由度 (DOF) が拘束されます。ロックされたジョイントは、シミュレーション全体を通じてアセンブリ内での初期位置を維持し、その速度はゼロになります。導入された拘束は、ジョイントの拘束力および拘束トルクに寄与します。 |
Normal | ノーマル モードでは、シミュレーション全体を通じてジョイントの DOF と拘束が通常の動作になります。 |
Disengaged | 解放モードでは、シミュレーション全体を通じてジョイントのすべての拘束が解放されます。 |
Provided by Input | [Provided by Input] オプションを使用すると、端子 mode が表示されます。入力信号を使用してジョイント モードを制御できます。 |
Composite Force/Torque Sensing
Direction — 測定の方向
Follower on Base (既定値) | Base on Follower
測定の方向。以下のいずれかの値として指定します。
Follower on Base— ブロックは、follower 座標系が base 座標系に及ぼす力およびトルクを検出します。Base on Follower— ブロックは、base 座標系が follower 座標系に及ぼす力およびトルクを検出します。
このパラメーターは、[Composite Force/Torque Sensing] セクションの出力信号にのみ影響します。この方向を反転すると、測定の符号が変わります。詳細は、力とトルクの測定の方向を参照してください。
Resolution Frame — 測定値の解決に使用される座標系
Base (既定値) | Follower
測定値の解決に使用される座標系。以下のいずれかの値として指定します。
Base— ブロックは base 座標系の座標で測定値を解決します。Follower— ブロックは follower 座標系の座標で測定値を解決します。
このパラメーターは、[Composite Force/Torque Sensing] セクションの出力信号にのみ影響します。
Constraint Force — ジョイントの拘束力を検出するかどうか
オフ (既定値) | オン
端子 [fc] を有効にするには、このパラメーターを選択します。
Constraint Torque — ジョイントの拘束トルクを検出するかどうか
オフ (既定値) | オン
端子 [tc] を有効にするには、このパラメーターを選択します。
Total Force — ジョイントの合計力を検出するかどうか
オフ (既定値) | オン
端子 [ft] を有効にするには、このパラメーターを選択します。
Total Torque — ジョイントの合計トルクを検出するかどうか
オフ (既定値) | オン
端子 [tt] を有効にするには、このパラメーターを選択します。
拡張機能
C/C++ コード生成
Simulink® Coder™ を使用して C および C++ コードを生成します。
バージョン履歴
R2012a で導入
MATLAB コマンド
次の MATLAB コマンドに対応するリンクがクリックされました。
コマンドを MATLAB コマンド ウィンドウに入力して実行してください。Web ブラウザーは MATLAB コマンドをサポートしていません。
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list:
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)