lsqnonlin
非線形最小二乗 (非線形データ適合) 問題を解く
構文
説明
非線形最小二乗ソルバー
以下の形式の非線形最小二乗曲線近似問題を解きます。
以下の制約に従います。
x、lb および ub はベクトルまたは行列とすることができます。行列引数を参照してください。
目的関数をスカラー値 (二乗和) として指定しないでください。lsqnonlin は次の "ベクトル" 値関数となる目的関数を必要とします。
x = lsqnonlin(fun,x0)x0 を開始点として、fun に記述する関数の二乗和の最小値を求めます。関数 fun は、値の二乗和ではなく値のベクトル (または配列) を返します。(アルゴリズムは fun(x) の要素の二乗和を暗黙的に計算します。)
メモ
追加パラメーターの受け渡し は必要に応じて他のパラメーターを関数 fun(x) へ渡す方法を説明します。
例
単純な指数関数の当てはめ
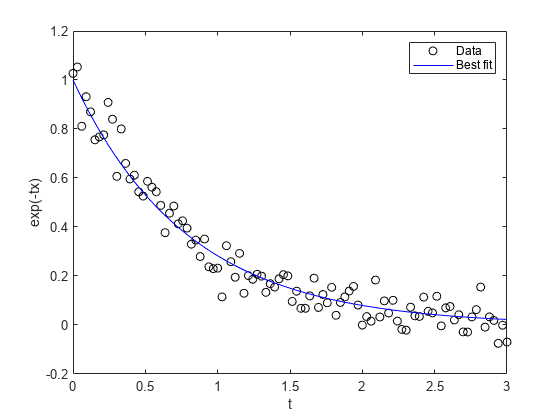
単純な指数減衰曲線をデータに当てはめます。
ノイズを含む指数減衰モデルからデータを生成します。モデルは次のとおりです。
ここで、 の範囲は 0 ~ 3、 は平均が 0、標準偏差が 0.05 の正規分布ノイズです。
rng default % for reproducibility d = linspace(0,3); y = exp(-1.3*d) + 0.05*randn(size(d));
問題は、データ (d、y) について、データに最も適合する指数減衰率の検出です。
指数減衰率の値 を使用して、その減衰率とデータをもつモデルとの差のベクトルを返す、無名関数を作成します。
fun = @(r)exp(-d*r)-y;
最適な減衰率の値を求めます。任意の初期推定 x0 = 4 を選択します。
x0 = 4; x = lsqnonlin(fun,x0)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
x = 1.2645
データおよび最適適合指数曲線をプロットします。
plot(d,y,'ko',d,exp(-x*d),'b-') legend('Data','Best fit') xlabel('t') ylabel('exp(-tx)')
範囲に制約のある問題の近似
適合パラメーターの一部が有界である場合の最適適合モデルを求めます。
次の関数のセンタリング およびスケーリング による最適な近似が、
次の標準正規密度に対して成り立つようにします。
データ点のベクトル t、およびこれらの点の対応する正規密度を作成します。
t = linspace(-4,4); y = 1/sqrt(2*pi)*exp(-t.^2/2);
センタリングおよびスケーリングした関数と、正規の y との差を評価する関数を作成します。ここで、x(1) はスケーリング 、x(2) はセンタリング です。
fun = @(x)x(1)*exp(-t).*exp(-exp(-(t-x(2)))) - y;
x0 = [1/2,0] から開始して、最適近似を求めます。スケーリング は 1/2 ~ 3/2、センタリング は -1 ~ 3 とします。
lb = [1/2,-1]; ub = [3/2,3]; x0 = [1/2,0]; x = lsqnonlin(fun,x0,lb,ub)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
x = 1×2
0.8231 -0.2444
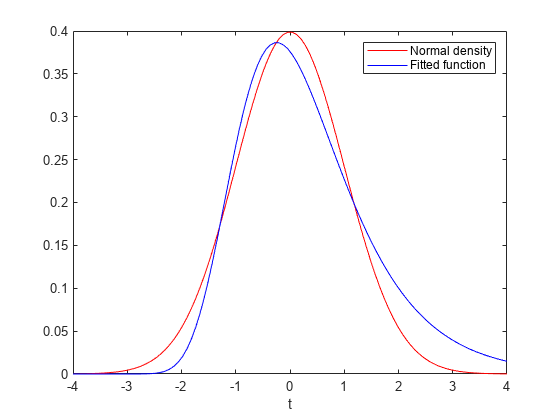
2 つの関数をプロットして、近似の質を確認します。
plot(t,y,'r-',t,fun(x)+y,'b-') xlabel('t') legend('Normal density','Fitted function')
線形制約を使用した最小二乗法
次の目的関数、二乗和について考えます。
この目的関数のコードは、この例の終わりに関数 myfun として掲載しています。
線形制約 に従ってこの関数を最小化します。この制約を として記述します。
A = [1 -1/2]; b = 0;
範囲 、、、および を設定します。
lb = [0 0]; ub = [2 4];
最適化プロセスを点 x0 = [0.3 0.4] から開始します。
x0 = [0.3 0.4];
この問題には線形等式制約がありません。
Aeq = []; beq = [];
最適化を実行します。
x = lsqnonlin(@myfun,x0,lb,ub,A,b,Aeq,beq)
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
0.1695 0.3389
function F = myfun(x) k = 1:10; F = 2 + 2*k - exp(k*x(1)) - 2*exp(2*k*(x(2)^2)); end
非線形制約を使用した非線形最小二乗法
次の目的関数、二乗和について考えます。
この目的関数のコードは、この例の終わりに関数 myfun として掲載しています。
非線形制約 に従ってこの関数を最小化します。この非線形制約関数のコードは、この例の終わりに関数 nlcon として掲載しています。
範囲 、、、および を設定します。
lb = [0 0]; ub = [2 4];
最適化プロセスを点 x0 = [0.3 0.4] から開始します。
x0 = [0.3 0.4];
この問題には、線形制約がありません。
A = []; b = []; Aeq = []; beq = [];
最適化を実行します。
x = lsqnonlin(@myfun,x0,lb,ub,A,b,Aeq,beq,@nlcon)
Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current step is less than the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
0.2133 0.3266
function F = myfun(x) k = 1:10; F = 2 + 2*k - exp(k*x(1)) - 2*exp(2*k*(x(2)^2)); end function [c,ceq] = nlcon(x) ceq = []; c = sin(x(1)) - cos(x(2)); end
既定以外のオプションを使った非線形最小二乗
異なる lsqnonlin アルゴリズムを使用して、データ適合の問題の結果を比較します。
観測時間データ xdata および観測応答データ ydata について、次の形式のモデルが適合するパラメーター および を求めるものとします。
観測時間と応答を入力します。
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
単純な指数減衰モデルを作成します。このモデルは、予測値と観測値の差のベクトルを計算します。
fun = @(x)x(1)*exp(x(2)*xdata)-ydata;
開始点 x0 = [100,-1] を使用してモデルを当てはめます。まず、既定の 'trust-region-reflective' アルゴリズムを使用します。
x0 = [100,-1]; options = optimoptions(@lsqnonlin,'Algorithm','trust-region-reflective'); x = lsqnonlin(fun,x0,[],[],options)
Local minimum possible. lsqnonlin stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance.
x = 1×2
498.8309 -0.1013
'levenberg-marquardt' アルゴリズムを使用する場合と違いがあるかどうか確認します。
options.Algorithm = 'levenberg-marquardt';
x = lsqnonlin(fun,x0,[],[],options)Local minimum possible. lsqnonlin stopped because the relative size of the current step is less than the value of the step size tolerance.
x = 1×2
498.8309 -0.1013
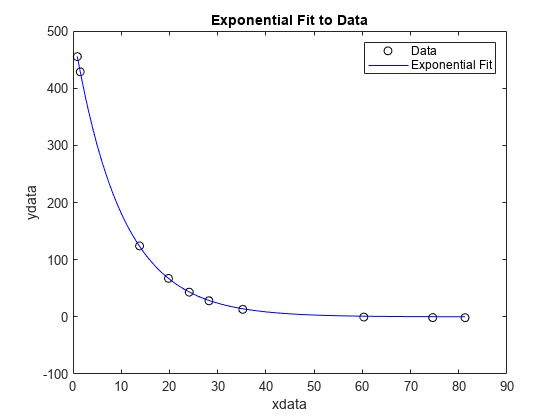
2 つのアルゴリズムで同じ解が得られています。解とデータをプロットします。
plot(xdata,ydata,'ko') hold on tlist = linspace(xdata(1),xdata(end)); plot(tlist,x(1)*exp(x(2)*tlist),'b-') xlabel xdata ylabel ydata title('Exponential Fit to Data') legend('Data','Exponential Fit') hold off
非線形最小二乗の解と残差のノルム
次を最小にする を求めます。
,
また、二乗和の最小値を求めます。
lsqnonlin は二乗和がユーザー関数で陽的に作成されて "いない" ことを想定しているため、lsqnonlin に渡す関数が以下のベクトル値関数を代わりに演算しなければなりません。
,
ここで、 ~ です (すなわち、 は 個の要素をもたなければなりません)。
関数 myfun (この例の終わりに掲載) が、10 要素のベクトル F を計算します。
点 x0 = [0.3,0.4] を開始点として、最小化点および最小値を求めます。
x0 = [0.3,0.4]; [x,resnorm] = lsqnonlin(@myfun,x0)
Local minimum possible. lsqnonlin stopped because the size of the current step is less than the value of the step size tolerance.
x = 1×2
0.2578 0.2578
resnorm = 124.3622
resnorm 出力は 2 乗残差ノルム、すなわち関数値の二乗和です。
次の関数は、ベクトル値目的関数を計算します。
function F = myfun(x) k = 1:10; F = 2 + 2*k-exp(k*x(1))-exp(k*x(2)); end
解法プロセスの検証
解法プロセスの発生時 (Display オプションを 'iter' に設定する)、およびその後 (output 構造体を調べる) の解法プロセスを検証します。
観測時間データ xdata および観測応答データ ydata について、次の形式のモデルが適合するパラメーター および を求めるものとします。
観測時間と応答を入力します。
xdata = ... [0.9 1.5 13.8 19.8 24.1 28.2 35.2 60.3 74.6 81.3]; ydata = ... [455.2 428.6 124.1 67.3 43.2 28.1 13.1 -0.4 -1.3 -1.5];
単純な指数減衰モデルを作成します。このモデルは、予測値と観測値の差のベクトルを計算します。
fun = @(x)x(1)*exp(x(2)*xdata)-ydata;
開始点 x0 = [100,-1] を使用してモデルを当てはめます。Display オプションを 'iter' に設定して、解法プロセスを検証します。output 構造体を取得し、解法プロセスの詳細情報を取得します。
x0 = [100,-1]; options = optimoptions('lsqnonlin','Display','iter'); [x,resnorm,residual,exitflag,output] = lsqnonlin(fun,x0,[],[],options);
Norm of First-order
Iteration Func-count Resnorm step optimality
0 3 359677 2.88e+04
Objective function returned Inf; trying a new point...
1 6 359677 11.6976 2.88e+04
2 9 321395 0.5 4.97e+04
3 12 321395 1 4.97e+04
4 15 292253 0.25 7.06e+04
5 18 292253 0.5 7.06e+04
6 21 270350 0.125 1.15e+05
7 24 270350 0.25 1.15e+05
8 27 252777 0.0625 1.63e+05
9 30 252777 0.125 1.63e+05
10 33 243877 0.03125 7.48e+04
11 36 243660 0.0625 8.7e+04
12 39 243276 0.0625 2e+04
13 42 243174 0.0625 1.14e+04
14 45 242999 0.125 5.1e+03
15 48 242661 0.25 2.04e+03
16 51 241987 0.5 1.91e+03
17 54 240643 1 1.04e+03
18 57 237971 2 3.36e+03
19 60 232686 4 6.04e+03
20 63 222354 8 1.2e+04
21 66 202592 16 2.25e+04
22 69 166443 32 4.05e+04
23 72 106320 64 6.68e+04
24 75 28704.7 128 8.31e+04
25 78 89.7947 140.674 2.22e+04
26 81 9.57381 2.02599 684
27 84 9.50489 0.0619927 2.27
28 87 9.50489 0.000462261 0.0114
Local minimum possible.
lsqnonlin stopped because the final change in the sum of squares relative to
its initial value is less than the value of the function tolerance.
出力構造体を検証し、解法プロセスの詳細情報を取得します。
output
output = struct with fields:
firstorderopt: 0.0114
iterations: 28
funcCount: 87
cgiterations: 0
algorithm: 'trust-region-reflective'
stepsize: 4.6226e-04
message: 'Local minimum possible....'
bestfeasible: []
constrviolation: []
比較のために、Algorithm オプションを 'levenberg-marquardt' に設定します。
options.Algorithm = 'levenberg-marquardt';
[x,resnorm,residual,exitflag,output] = lsqnonlin(fun,x0,[],[],options); First-order Norm of
Iteration Func-count Resnorm optimality Lambda step
0 3 359677 2.88e+04 0.01
Objective function returned Inf; trying a new point...
1 13 340761 3.91e+04 100000 0.280777
2 16 304661 5.97e+04 10000 0.373146
3 21 297292 6.55e+04 1e+06 0.0589933
4 24 288240 7.57e+04 100000 0.0645444
5 28 275407 1.01e+05 1e+06 0.0741266
6 31 249954 1.62e+05 100000 0.094571
7 36 245896 1.35e+05 1e+07 0.0133606
8 39 243846 7.26e+04 1e+06 0.0094431
9 42 243568 5.66e+04 100000 0.0082162
10 45 243424 1.61e+04 10000 0.00777935
11 48 243322 8.8e+03 1000 0.0673933
12 51 242408 5.1e+03 100 0.675209
13 54 233628 1.05e+04 10 6.59804
14 57 169089 8.51e+04 1 54.6992
15 60 30814.7 1.54e+05 0.1 196.939
16 63 147.496 8e+03 0.01 129.795
17 66 9.51503 117 0.001 9.96069
18 69 9.50489 0.0714 0.0001 0.080486
19 72 9.50489 5.23e-05 1e-05 5.07043e-05
Local minimum possible.
lsqnonlin stopped because the relative size of the current step is less than
the value of the step size tolerance.
'levenberg-marquardt' の方が少ない反復回数で収束していますが、関数評価の回数はほぼ同じです。
output
output = struct with fields:
iterations: 19
funcCount: 72
stepsize: 5.0704e-05
cgiterations: []
firstorderopt: 5.2319e-05
algorithm: 'levenberg-marquardt'
message: 'Local minimum possible....'
bestfeasible: []
constrviolation: []
入力引数
出力引数
制限
信頼領域 Reflective 法アルゴリズムは劣決定システムを扱いません。方程式の数、つまり F の行数が少なくとも変数の数と同じである必要があります。劣決定の場合、
lsqnonlinはレーベンバーグ・マルカート法アルゴリズムを使用します。lsqnonlinは複素数値問題を直接解くことができます。制約は複素数値に対して意味を持たないことに注意してください。なぜなら、複素数はきちんと順序付けされておらず、ある複素数値が他の複素数値より大きいか小さいかを問うことは無意味だからです。範囲制約を使用した複素数問題では、変数を実数部と虚数部に分けます。複素数データに'interior-point'アルゴリズムを使用しないでください。詳細については、複素数値データへのモデルの当てはめを参照してください。信頼領域 Reflective 法の前処理付き共役勾配法で使用される前提条件子の計算では、その計算の前に JTJ (J はヤコビ行列) を作成します。そのため多くの非ゼロ要素をもつ J の行は、密行列の積 JTJ に近い結果になり、大規模な問題についてはかなりのコストを要する解法プロセスになる場合があります。
x の構成要素に上限 (または下限) がない場合、
lsqnonlinでは非常に大きい任意の正の値 (下限に対しては負の値) を設定する代わりに、inf(下限に対しては-inf) をub(またはlb) の対応する構成要素に設定する方がより適切です。
lsqnonlin、lsqcurvefit、fsolve の信頼領域 Reflective 法アルゴリズムは、fun でヤコビアンを計算せずに、あるいはヤコビ スパース パターンを提示せずに、小規模から中規模の問題で使用できます。(これは、ヘッシアンの計算やヘッセ スパース パターンの入力なしで、fmincon または fminunc を使用する場合にも適用されます。) 小、中規模問題とは、どのくらい小さいのでしょうか。絶対的な答えはありません。ご利用のコンピューター システムの構成における仮想メモリ量によって異なるからです。
m 個の方程式と n 個の未知数の問題を考えてみましょう。コマンド J = sparse(ones(m,n)) が Out of memory エラーを引き起こす場合は、間違いなく大きな問題が発生しています。エラーが発生しない場合でも、問題の規模が大きすぎる場合があります。判定するには、問題を実行して MATLAB がシステムで使用可能な仮想メモリ内で実行されるかどうかを確認します。
アルゴリズム
レーベンバーグ・マルカート法および信頼領域 Reflective 法は、fsolve にも使用される非線形最小二乗アルゴリズムに基づいています。
既定の信頼領域 Reflective 法アルゴリズムは部分空間の信頼領域法であり、[1] および [2] で説明する interior-reflective ニュートン法に基づいています。各反復は、前処理付き共役勾配 (PCG) 法を使用する大型線形システムの近似解を伴います。詳細については、信頼領域 Reflective 法の最小二乗を参照してください。
レーベンバーグ・マルカート法は [4]、[5]、[6] の参考文献で説明されています。詳細については、レーベンバーグ・マルカート法を参照してください。
'interior-point' アルゴリズムは fmincon 'interior-point' アルゴリズムにいくつかの変更を加えて使用します。詳細については、制約付き最小二乗法に合わせて変更された fmincon アルゴリズムを参照してください。
代替機能
アプリ
[最適化] ライブ エディター タスクが lsqnonlin にビジュアル インターフェイスを提供します。
参照
[1] Coleman, T.F. and Y. Li. “An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds.” SIAM Journal on Optimization, Vol. 6, 1996, pp. 418–445.
[2] Coleman, T.F. and Y. Li. “On the Convergence of Reflective Newton Methods for Large-Scale Nonlinear Minimization Subject to Bounds.” Mathematical Programming, Vol. 67, Number 2, 1994, pp. 189–224.
[3] Dennis, J. E. Jr. “Nonlinear Least-Squares.” State of the Art in Numerical Analysis, ed. D. Jacobs, Academic Press, pp. 269–312.
[4] Levenberg, K. “A Method for the Solution of Certain Problems in Least-Squares.” Quarterly Applied Mathematics 2, 1944, pp. 164–168.
[5] Marquardt, D. “An Algorithm for Least-squares Estimation of Nonlinear Parameters.” SIAM Journal Applied Mathematics, Vol. 11, 1963, pp. 431–441.
[6] Moré, J. J. “The Levenberg-Marquardt Algorithm: Implementation and Theory.” Numerical Analysis, ed. G. A. Watson, Lecture Notes in Mathematics 630, Springer Verlag, 1977, pp. 105–116.
[7] Moré, J. J., B. S. Garbow, and K. E. Hillstrom. User Guide for MINPACK 1. Argonne National Laboratory, Rept. ANL–80–74, 1980.
[8] Powell, M. J. D. “A Fortran Subroutine for Solving Systems of Nonlinear Algebraic Equations.” Numerical Methods for Nonlinear Algebraic Equations, P. Rabinowitz, ed., Ch.7, 1970.
拡張機能
バージョン履歴
R2006a より前に導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)