cart2sph
直交座標を球面座標に変換
説明
例
入力引数
出力引数
アルゴリズム
3次元直交座標から球面座標へのマッピングは、以下のようになります。
azimuth = atan2(y,x) elevation = atan2(z,sqrt(x.^2 + y.^2)) r = sqrt(x.^2 + y.^2 + z.^2)
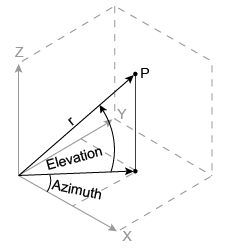
球面座標のこの表記法は標準的なものではありません。関数 cart2sph の場合、elevation は x-y 平面から計測されます。elevation = 0 の場合、点は x-y 平面にあります。elevation = pi/2 の場合、点は正の z 軸上にあります。
拡張機能
バージョン履歴
R2006a より前に導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)