このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
hough
ハフ変換
説明
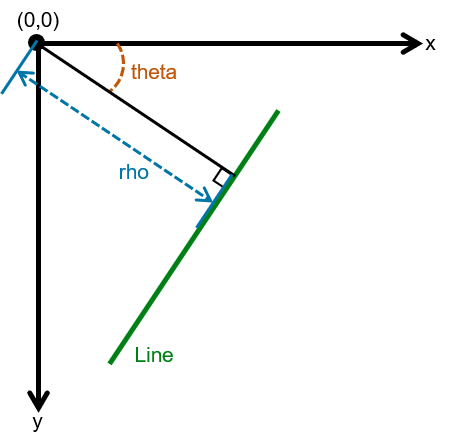
[ はバイナリ イメージ H,theta,rho] = hough(BW)BW の標準的なハフ変換 (SHT) を計算します。関数 hough はラインを検出するように設計されています。関数はラインのパラメトリック表現 rho = x*cos(theta) + y*sin(theta) を使用します。この関数は、ラインに垂直なベクトルに沿った原点からラインまでの距離 rho と x 軸とこのベクトルとの間の角度 theta (度単位) を返します。また、この関数は、行と列がそれぞれ rho と theta の値に対応するパラメーター空間行列になる、SHT H を返します。詳細については、アルゴリズムを参照してください。
例
ハフ変換の計算と表示
イメージを読み取り、グレースケール イメージに変換します。
RGB = imread('gantrycrane.png');
I = im2gray(RGB);エッジを抽出します。
BW = edge(I,'canny');ハフ変換を計算します。
[H,T,R] = hough(BW,'RhoResolution',0.5,'Theta',-90:0.5:89);
元のイメージとハフ行列を表示します。
subplot(2,1,1); imshow(RGB); title('gantrycrane.png'); subplot(2,1,2); imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Hough transform of gantrycrane.png'); xlabel('\theta'), ylabel('\rho'); axis on, axis normal, hold on; colormap(gca,hot);

限られた Theta 範囲のハフ変換の計算
イメージを読み取ってグレースケールに変換します。
RGB = imread('gantrycrane.png');
I = im2gray(RGB);エッジを抽出します。
BW = edge(I,'canny');限られた範囲の角度にわたってハフ変換を計算します。
[H,T,R] = hough(BW,'Theta',44:0.5:46);ハフ変換を表示します。
figure imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Limited Theta Range Hough Transform of Gantrycrane Image'); xlabel('\theta') ylabel('\rho'); axis on, axis normal; colormap(gca,hot)

入力引数
出力引数
アルゴリズム
標準的なハフ変換 (SHT) はラインのパラメトリック表現を使用します。
rho = x*cos(theta) + y*sin(theta)
座標系の原点は、左上隅のピクセルの中心にあると仮定されます。
変数 "rho" は、原点からラインまでの垂直距離です。
変数 "theta" は、原点からラインまでの垂直な投影を正の "x" 軸から時計回りに測定した角度です。theta の範囲は –90° ≤ θ < 90° です。ライン自体の角度は θ + 90° で、正の x 軸に対して時計回りに測定されています。
SHT は、行と列がそれぞれ "rho" 値と "theta" 値に対応するパラメーター空間行列です。SHT の要素は積和セルを表します。当初、各セルの値はゼロです。次に、イメージの背景以外のすべての点で、rho が theta ごとに計算されます。rho は SHT 内の最も近似する行に丸められます。積和セルは増分されます。この手順の終了時に、SHT(r,c) の Q の値は、xy 平面の Q 点が theta(c) と rho(r) によって指定されたライン上にあることを意味します。SHT のピーク値は入力イメージの潜在的なラインを表します。
ハフ変換行列 H は nrho 行 ntheta 列の行列です。ここで、
nrho = 2*(ceil(D/RhoResolution)) + 1 および
D = sqrt((numRowsInBW - 1)^2 + (numColsInBW - 1)^2) です。
rho 値は -diagonal から diagonal までの範囲です。ここで、
diagonal = RhoResolution*ceil(D/RhoResolution) です。
ntheta = length(theta)
拡張機能
バージョン履歴
R2006a より前に導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)