LTI モデル オブジェクトの Simulink へのインポート
LTI System ブロックを使用して線形システム モデル オブジェクトを Simulink® にインポートします。LTI モデル オブジェクトとして表される線形システムをシミュレートして、これらのシステムをより複雑なシステムの Simulink モデルの要素として組み込むことができます。
ブロック パラメーターで、LTI システム変数パラメーターを、インポートする LTI モデルに設定します。状態空間モデルの場合、初期状態パラメーターを、ゼロ以外の初期状態を指定するベクトルに設定します。
LTI モデルの Simulink でのシミュレーション
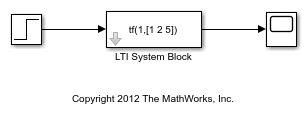
LTISystemBlockSimulation モデルは、LTI System ブロックを使用してステップ入力への SISO 伝達関数の応答をシミュレートする方法を示しています。
LTI System ブロックのモデルを指定するには、LTI システム変数ブロック パラメーターを次のいずれかに設定します。
MATLAB® ワークスペースまたはモデル ワークスペースにおける LTI モデルの変数名 (
sysなど)。LTI モデルとして評価される MATLAB 式 (
tf(1,[1 1])など)。
たとえば、状態空間 (ss) モデル、零点-極-ゲイン (zpk) モデル、または伝達関数 (tf) モデルを指定できます。SISO モデルまたは MIMO モデル、および連続時間モデルまたは離散時間モデルをシミュレートできます。
LTISystemBlockSimulation モデルでは [LTI システム変数] パラメーターが MATLAB 式 tf(1,[1 2 5]) なので、連続時間の SISO 伝達関数が作成されます。指定されたシステムが状態空間 (ss) モデルの場合、[初期状態] パラメーターを使用して初期状態の値を指定できます。
モデルをシミュレートして、結果をスコープで確認します。
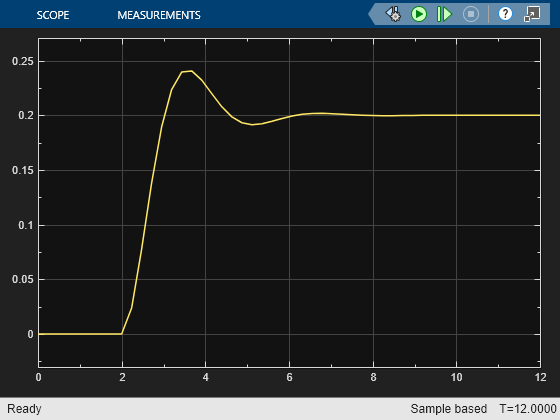
この例では、t = 2 秒でのステップ入力へのシステム応答をシミュレートします。LTI System ブロックを使って LTI モデル オブジェクトを Simulink モデル内の任意の場所にインポートし、任意の入力への線形システム応答をシミュレートします。
MIMO LTI モデルの Simulink へのインポート
このモデルでは、LTI System ブロックを使用して Simulink® で MIMO 線形システムを表す方法を示します。
LTI System ブロックは、ブロックに MIMO モデルを指定した場合でも、1 つの入力と 1 つの出力をもちます。この場合、ブロックの入力と出力はベクトル信号になります。たとえば、モデル LTISystemBlockMIMO は、LTI System ブロックを使用して制御システムの MIMO プラントを表現します。

このモデルでは、ブロックで指定された LTI システムは、モデル ワークスペースに保存されている 2 出力 2 入力の伝達関数モデル Gm です。Mux ブロックは、2 つのコントローラー出力を LTI System ブロック入力のために 1 つのベクトル信号に組み合わせます。同様に、Demux ブロックは、LTI System ブロックのベクトル出力を 2 つのスカラー信号に分離します。
モデルをシミュレートして、結果をスコープで確認します。

この例は、閉ループ システム応答を、最初の入力では t = 50 秒のステップでシミュレートし、2 番目の入力では t = 150 秒のステップでシミュレートします。LTI システム ブロックは、LTI システムを Simulink モデルに挿入するために任意の場所で使用できます。
参考
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)