設定値追従と外乱の抑制のいずれかを優先するための PID コントローラーの調整 (PID 調整器)
この例では、PID コントローラーを調整して設定値追従のオーバーシュートを小さくしたり、プラント入力における外乱の抑制を改善する方法を示します。PID 調整器アプリを使用して、PI 制御システムと PID 制御システムでは設定値追従と外乱の抑制との間に性能のトレードオフがあることを説明します。
この例では、プラントを LTI モデルとして表します。Simulink® モデルの PID Controller ブロックの PID 調整器による調整の詳細については、設定値追従と外乱の抑制のいずれかを優先するための PID コントローラーの調整 (Simulink Control Design)を参照してください。
次の図の制御システムについて考えます。
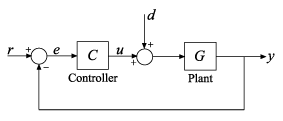
この例のプラントは次のとおりです。
設定値追従は、r の信号に対する y での応答です。外乱の抑制は d の信号の y における抑制の測定値です。PID 調整器を使用してコントローラーを調整する際は、設計を調整して、設定値追従または外乱の抑制のいずれかをアプリケーションでの要求に沿うよう優先できます。
初期 PI コントローラーの設計
初期コントローラーを設計しておくと、PI コントローラーを調整するたびに結果を比較できるベースラインが提供されます。プラント用初期 PI コントローラーの設計を、PID 調整コマンド pidtune を使用して作成します。
G = tf(0.3,[1,0.1,0]); % plant model C = pidtune(G,'PI');
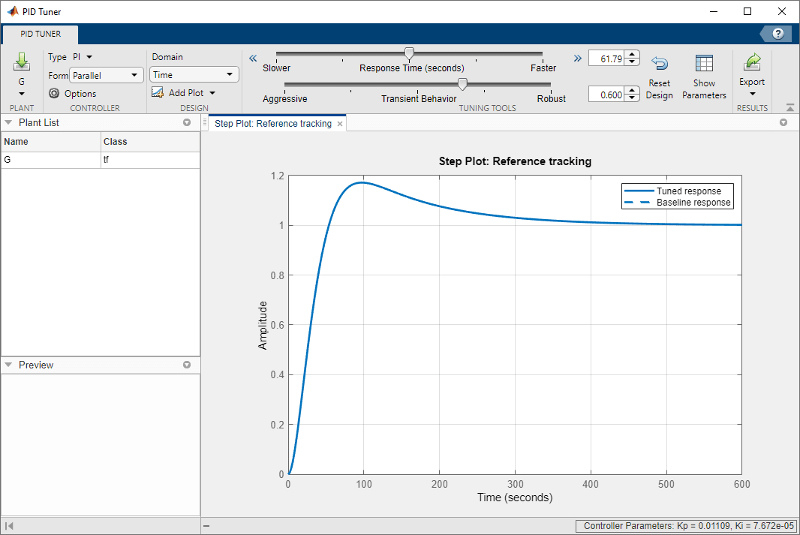
初期コントローラーの設計を使用して PID 調整器を開きます。
pidTuner(G,C)
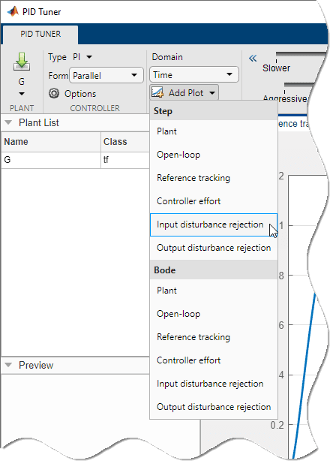
入力外乱の抑制のステップ応答プロットを追加します。[プロットの追加] 、 [入力外乱の抑制] を選択します。
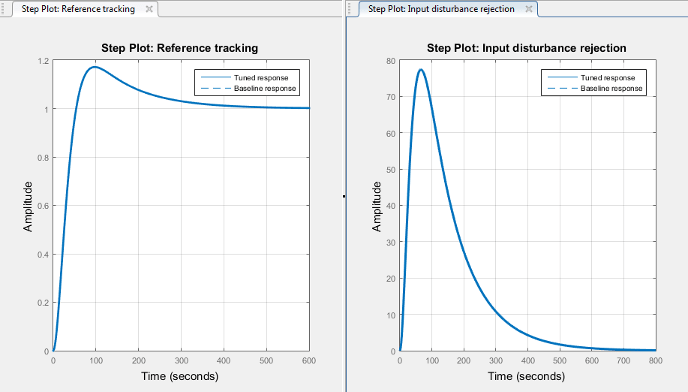
PID 調整器は、外乱の抑制プロットを設定値追従プロットと並べて表示します。
ヒント
[表示] タブのオプションを使用して、PID 調整器で複数のプロットを表示する方法を変更します。
既定では、特定の帯域幅と位相余裕に対し、設定値追従と外乱の抑制との間でバランスが取れるように PID 調整器がコントローラーを調整します。この場合、コントローラーにより、設定値追従応答でいくらかのオーバーシュートが発生します。コントローラーはまた、最初のピークの後、設定値追従より長い整定時間で入力外乱を抑制します。
過渡動作の調整
アプリケーションによっては、設定値追従と外乱の抑制とのバランスを変え、一方を他方より優先させることが望ましい場合があります。PI コントローラーでは、[過渡動作] スライダーを使用してこのバランスを変更できます。スライダーを左に動かすと、外乱の抑制機能が高まります。初期コントローラーの設計による応答が [ベースライン応答] (点線) として表示されるようになります。
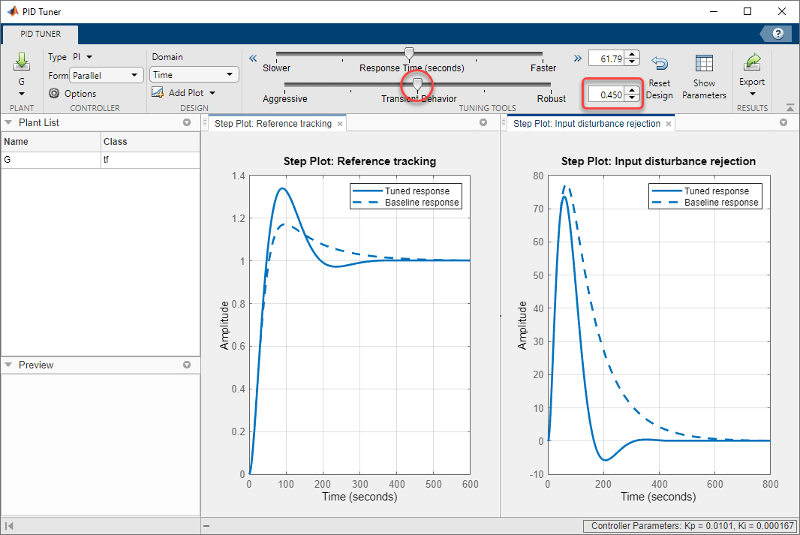
過渡動作係数を 0.45 に下げると外乱の抑制が加速しますが、設定値追従応答でのオーバーシュートも大きくなります。
ヒント
設定値追従プロットを右クリックして [特性] 、 [ピーク応答] を選択すると、オーバーシュートの数値を取得できます。
[過渡動作] スライダーを、設定値追従応答でのオーバーシュートが最小になるまで右に動かします。

過渡動作係数を 0.70 まで上げるとオーバーシュートはほとんどなくなりますが、その結果、外乱の抑制が極度に遅くなります。[過渡動作] スライダーを、設定値追従と外乱の抑制との間で、アプリケーションに適したバランスが見つかるまで動かしてみてください。スライダーを動かすことによるバランスへの効果は、プラント モデルによって異なります。プラント モデルによっては、この例で示したほど効果が大きくない場合があります。
PID 調整の設計フォーカスの変更
これまでのところ、過渡動作係数を変更しても、制御システムの応答時間は固定されたままになっていました。こうした操作は、帯域幅を固定し、システムのターゲット最小位相余裕を変化させるのと同じです。帯域幅とターゲット位相余裕の両方を固定する場合でも、設定値追従と外乱の抑制との間のバランスを変更できます。外乱の抑制と設定値追従のいずれかを優先するようコントローラーを調整するには、PID 調整アルゴリズムの "設計フォーカス" を変更します。
制御システムに調整可能なパラメーターが多くあるほど、PID 調整器の設計フォーカスを変更する効果は高まります。したがって、PI コントローラーで使用しても大きな効果は得られません。その効果を確認するには、コントローラーのタイプを PIDF に変更します。[タイプ] メニューで [PIDF] を選択します。

PID 調整器は、新しいタイプのコントローラーである PIDF を自動的に設計します。[過渡動作] スライダーを動かして、係数の設定を 0.6 に戻します。
[エクスポート] 矢印  をクリックして
をクリックして [ベースラインとして保存] を選択することにより、この新しい設計をベースライン設計として保存します。

ベースライン プロットとして、PIDF 設計により元の PI 設計が置き換えられています。
PI のケースと同じように、初期 PIDF 設計では設定値追従と外乱の抑制とのバランスを取ります。やはり PI のケースと同じように、このコントローラーでは設定値追従応答にいくらかのオーバーシュートが発生し、同程度の整定時間で入力外乱を抑制します。

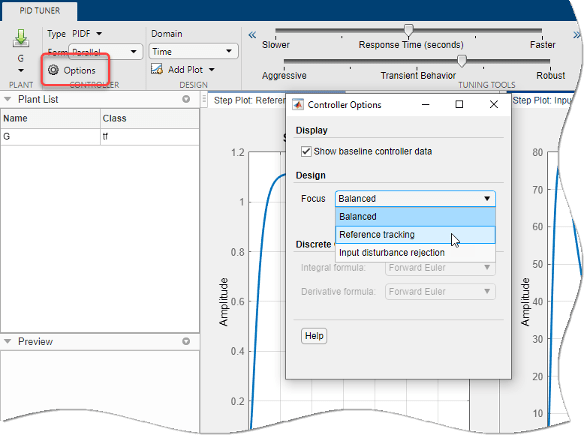
応答時間も過渡動作係数も変更せずに設定値追従を優先するには、PID 調整器の設計フォーカスを変更します。そのためには、 [オプション] をクリックし、[フォーカス] メニューで
[オプション] をクリックし、[フォーカス] メニューで [設定値追従] を選択します。
PID 調整器はコントローラー係数を、設定値追従の性能に重点を置いて自動的に再調整します。

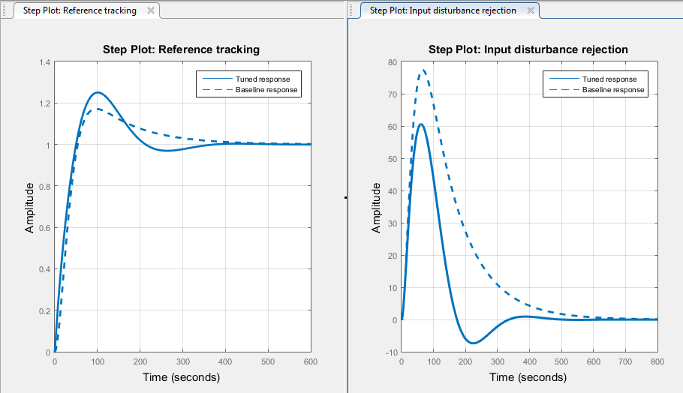
設定値追従に重点を置いて調整された PIDF コントローラーは [調整された応答] (実線) として表示されます。プロットでは、結果として得られたコントローラーが基準入力の追跡において、バランス重視のコントローラー設計よりもオーバーシュートがずっと小さく、整定時間も速くなっていることが示されています。ただし、この設計の結果、外乱の抑制は大幅に劣化しています。
設計フォーカスを、外乱の抑制を優先するよう変更します。 [オプション] ダイアログ ボックスの [フォーカス] メニューで、
[オプション] ダイアログ ボックスの [フォーカス] メニューで、[入力外乱の抑制] を選択します。
このコントローラー設計の結果、外乱の抑制は改善しますが、設定値追従応答でのオーバーシュートはいくらか大きくなります。
設計フォーカス オプションを使用している場合でも、[過渡動作] スライダーを調整することで、性能についての 2 つの測定間のバランスをさらに微調整できます。設計フォーカスとスライダーを併用すると、設計要件を最もよく満たす性能バランスが実現されます。この微調整がシステム性能にもたらす効果は、プラントの特性に強く左右されます。プラントによっては、[過渡動作] スライダーを動かしても [フォーカス] オプションを変更しても、ほとんどあるいはまったく効果がありません。
関連するトピック
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)