このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
comm.GMSKTimingSynchronizer
4 次非線形性法を使用したシンボル タイミング位相の再生
説明
GMSKTimingSynchronizer オブジェクトは、4 次非線形性法を使用して、入力信号のシンボル タイミング位相を再生します。このブロックは一般的な非データ支援フィードバック法を実行します。このタイミング同期は、データ支援を用いないフィードバック メソッドを実現します。このメソッドは、搬送波位相の再生とは独立で、搬送波周波数オフセットに対する事前の補償を必要とします。このブロックを、ガウス最小偏移変調 (GMSK) 変調を使用するシステムに使用できます。
入力信号のシンボル タイミング位相を再生するには、以下の手順に従います。
メモ
R2016b 以降では、step メソッドを使用して、System object™ によって定義された演算を実行する代わりに、引数を関数であるかのように使ってオブジェクトを呼び出すことができます。たとえば、y = step(obj,x) と y = obj(x) は同等の演算を実行します。
構築
H = comm.GMSKTimingSynchronizer はタイミング位相同期装置 System object H を作成します。このオブジェクトは、4 次非線形性法を使用して、GMSK 入力信号のシンボル タイミング位相を再生します。
H = comm.GMSKTimingSynchronizer( は、指定された各プロパティが指定の値に設定された GMSK タイミング同期装置オブジェクト Name,Value)H を作成します。(Name1,Value1,...,NameN,ValueN) のように、追加の名前と値のペアの引数を任意の順番で指定できます。
プロパティ
|
各シンボルを表すサンプル数
|
|
誤り更新ステップ サイズ 連続タイミング位相推定を更新するステップ サイズを正の実数スカラー値で指定します。通常は、ゆるやかに変化するタイミング位相に対応する 1/ |
|
同期リセット入力を有効にする このプロパティを このプロパティを リセット入力として非ゼロの値を指定すると、オブジェクトはタイミング位相再生処理を再起動します。このプロパティを |
|
タイミング位相再生リセットの条件 タイミング位相再生処理を このプロパティを このプロパティを |
メソッド
| step | 4 次非線形性法を使用したシンボル タイミング位相の再生 |
例
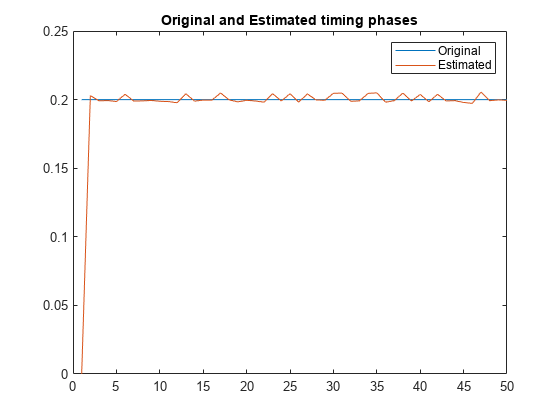
GMSK 信号のタイミング位相の再生
GMSK 変調器、可変非整数遅延、GMSK タイミング同期装置 System object を作成します。
gmskMod = comm.GMSKModulator('BitInput', true, ... 'SamplesPerSymbol', 14); timingOffset = 0.2; varDelay = dsp.VariableFractionalDelay; gmskTimingSync = comm.GMSKTimingSynchronizer('SamplesPerSymbol', 14, ... 'ErrorUpdateGain', 0.05);
主処理ループは次のようになります。
phEst = zeros(50,1); for i = 1:50 data = randi([0 1],100,1); % Generate data modData = gmskMod(data); % Modulate data % Apply timing offset error impairedData = varDelay(modData,timingOffset*14); % Perform timing phase recovery [~,phase] = gmskTimingSync(impairedData); phEst(i) = phase(1)/14; end
結果をプロットします。
plot(1:50,[0.2*ones(50,1) phEst]) legend( 'Original','Estimated') title('Original and Estimated timing phases')
アルゴリズム
このオブジェクトは、MSK-Type Signal Timing Recovery ブロックのリファレンス ページで説明されているアルゴリズム、入力、および出力を実装しています。オブジェクト プロパティはブロック パラメーターに対応しますが、以下の場合を除きます。
オブジェクトは、[Modulation type] パラメーターを
GMSKに設定した MSK-Type Signal Timing Recovery ブロックに対応します。[Reset] パラメーターは、
ResetInputPortプロパティとResetConditionプロパティに対応します。
拡張機能
バージョン履歴
R2012a で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)